一、下位飞控相关测试
1. 连接地面站,查看飞行器姿态是否正确,如果出现严重姿态错误,进行传感器校准。
在进行任何关键的飞行任务或怀疑飞行器状态异常时,连接地面站并检查其姿态是首要的安全步骤。这个过程通常遵循以下详细操作:
注意:在校准过程中,必须确保远离大型金属物体、钢筋混凝土建筑、高压线等强磁场干扰源。校准完成后,重新将飞行器放平,再次回到第三步,检查地面站读数是否已恢复正常。
第一步:建立可靠连接
首先,确保飞行器已上电且处于水平静止状态。
第二步:进入姿态仪表板
在地面站软件的主界面,找到并打开飞行器状态仪表盘或飞行数据界面。这个界面通常会以图形化方式显示飞行器的当前姿态,核心是一个人工地平仪(姿态指示仪),它能直观地展示飞行器的俯仰(机头上下)和横滚(左右倾斜)角度。
俯仰与横滚检查:确认地平仪上模拟的天地线与飞行器实际的天地线是否一致。例如,如果飞行器实际停在平坦地面,机头水平,那么地平仪上的飞机标志也应位于中心水平线上,无俯仰或倾斜。
第四步:判断姿态异常的严重性
如果地面站显示的姿态与飞行器实际物理姿态基本吻合(例如,放在水平地面时,横滚和俯仰角度读数均接近0°;转动飞行器时,航向和姿态读数能实时、平滑地跟随变化),则说明姿态数据正常。
如果出现以下任何一种“严重姿态错误”的迹象,则需要立即停止后续操作,并进行传感器校准:
严重偏移:飞行器明确静止在水平地面,但地面站显示其处于大角度倾斜(如横滚超过10°)或剧烈俯仰状态。
数据僵死:当您手动改变飞行器的物理姿态(如将机头抬起或向左倾斜)时,地面站上的姿态数据完全无变化或变化卡顿、不连续。
第五步:执行传感器校准(如果发现严重错误)
一旦确认存在上述严重姿态错误,必须立即执行传感器校准。这通常包括:
加速度计校准:按照地面站软件的向导提示,将飞行器依次放置于多个特定姿态(如水平、左侧卧、右侧卧、机头向下、机头向上、背面朝上),软件会记录每个姿态下的加速度数据,以重新建立重力参考坐标系。
罗盘(磁力计)校准:按照向导提示,让飞行器在三维空间中缓慢、完整地旋转,使软件采集各个方向的磁场数据,以消除硬铁和软铁干扰,并准确判断地磁场方向。
水平校准:部分飞控在校准加速度计后,还需要进行一次水平校准,将当前平面定义为绝对水平面。
如校准失败,则考虑更换硬件。
2. 检查遥控器摇杆映射是否正确,如不正确进行遥控器校准,检查电机转向,如无法启动电机,则检查信号线接线是否正确,如仍然无法启动执行电调行程校准。
第一步:检查遥控器映射
- 打开遥控器,连接地面站,进入遥控器校准界面
- 推动各摇杆,检查通道对应关系是否正确(油门、俯仰、横滚、航向)
- 检查摇杆方向是否正确(推高油门数值应增大)
- 如映射错误或方向相反,在地面站中设置通道反向,或执行遥控器校准
第二步:检查电机转向
- 安全第一:拆下螺旋桨
- 在地面站中使用电机测试功能,逐个低速启动电机
- 对照机型电机转向图,检查每个电机转向是否正确
- 转向错误时:调换电机与电调之间的任意两根线即可改变转向

第三步:电机无法启动时检查接线
- 检查电调信号线是否插在飞控正确的电机输出口
- 检查信号线是否插紧,地线是否连接
- 检查电调电源输入是否正常(migpie360系列通常需要至少8V电压才能启动)
第四步:仍无法启动则执行电调行程校准
重新上电测试电机响应是否正常
拆下螺旋桨
执行油门行程校准,接通飞行器电源
听到提示音后,等待地面站确认可以拔下电源
电调发出确认音,校准完成,移除电源
二、上位机相关测试
1.激光雷达测试
打开遥控器电源、接通无人机电源,确认无人机连接到手机热点后建立ssh连接。
将飞行器放置在场地起飞点,并且确保已经拆卸桨叶,确保飞行器方向和位置完全准确后开始下一步。
分别启动三个ssh连接后的终端,依次分别输入后回车:
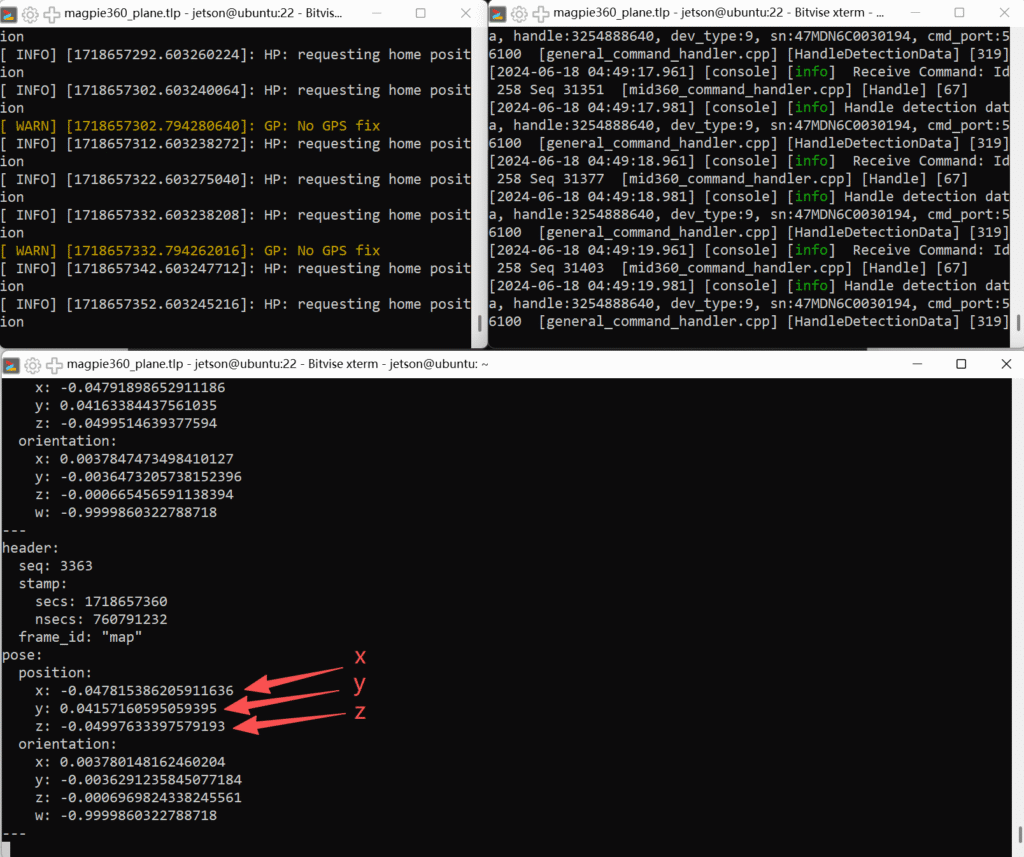
roslaunch tutorial_basic mavros.launch
roslaunch tutorial_navigation mid360.launch
rostopic echo /mavros/local_position/pose
观察ssh终端三中输出的飞行器位置与姿态信息,以及激光雷达是否存在报错(确保数据一直在刷新,否则需要修改mid360激光雷达SDK内IP地址参数)。
2.投放装置测试
打开两个终端,运行:
#第一个终端启动投放装置节点
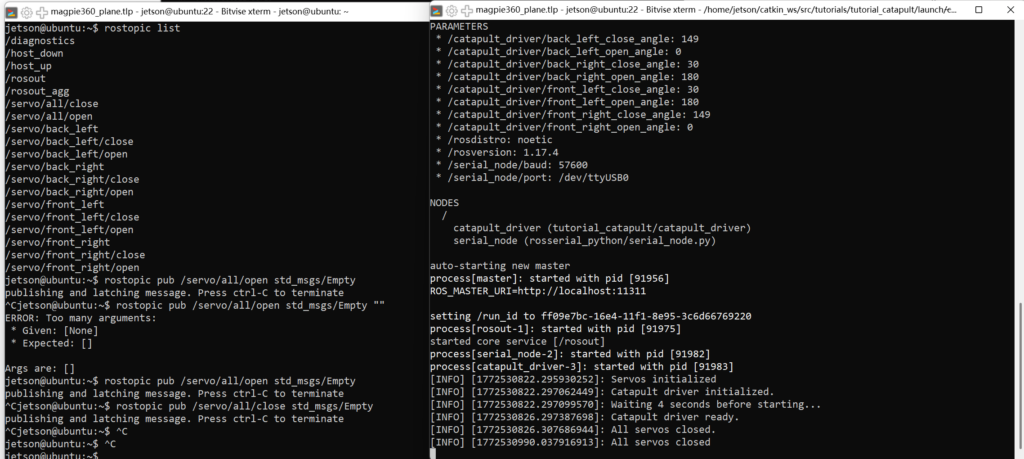
roslaunch tutorial_catapult catapult_driver.launch
#第二个终端运行
#打开全部舵机门
rostopic pub /servo/all/open std_msgs/Empty
##关闭全部舵机门
rostopic pub /servo/all/close std_msgs/Empty
3.摄像头测试
将摄像头数据线拔下插入到电脑端,打开相机应用,按下旋转摄像机或者切换摄像机按钮,切换到要检查的摄像机,随后检查图像是否清晰,对焦是否正常。
三、飞行测试
1.桨叶安装方向:
2.确保遥控器已经开机并且正确设置,安装好桨叶和电池,按下无人机GPS上的解锁按钮,将无人机放置在场地内。
如图确保按下遥控器左侧急停按钮指示灯到亮起状态。(每次按下时无人机会发出急停提示音,请务必听清楚提示音是否来自目前正在控制的无人机,防止意外)
3.手动驾驶无人机
请务必移除全部与飞行器连接的电缆(如屏幕与有线款键盘鼠标等等),人员务必撤离到隔离区或隔离网棚外。
使用自稳或定高模式起飞,确定飞行器可以正常操纵,随后降落。
4.自动驾驶仪测试,启动一个终端并且输入
在启动此指令前请务必确认遥控器急停按钮指示灯已经亮起,否则可能导致严重事故。
roslaunch tutorial_basic run_vel_control.launch请务必移除全部与飞行器连接的电缆(如屏幕与有线款键盘鼠标等等),人员务必撤离到隔离区或隔离网棚外。
请再次确认人员已经撤离到隔离网外,按下急停按钮指示灯到熄灭状态。
无人机将起飞(不进行方向控制),随后向前飞行1米并且旋转降落(期间可以手动接管)。
5.手动接管
左侧按钮指示灯亮起则为机载电脑自动驾驶模式。
左侧按钮指示灯熄灭则为手动操纵模式。
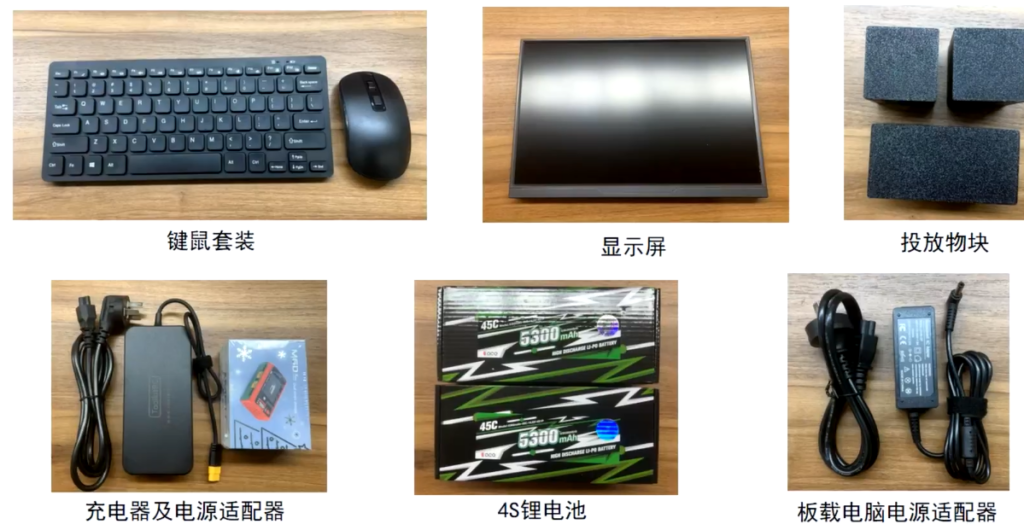
四、封箱前检查设备是否齐全。
包含:无人机、遥控器(高频头以及天线)、调试用电源、充电器电源、充电器、电池(两块)、键鼠套装(包含接收机)、显示器、线缆接头(UsbTypeC数据线(黑)、UsbTypeC电源线(白)、HDMI线、DP转HDMI转接头)、消耗件(桨保一支*4套、桨叶正反一对*4套、物块*4)。