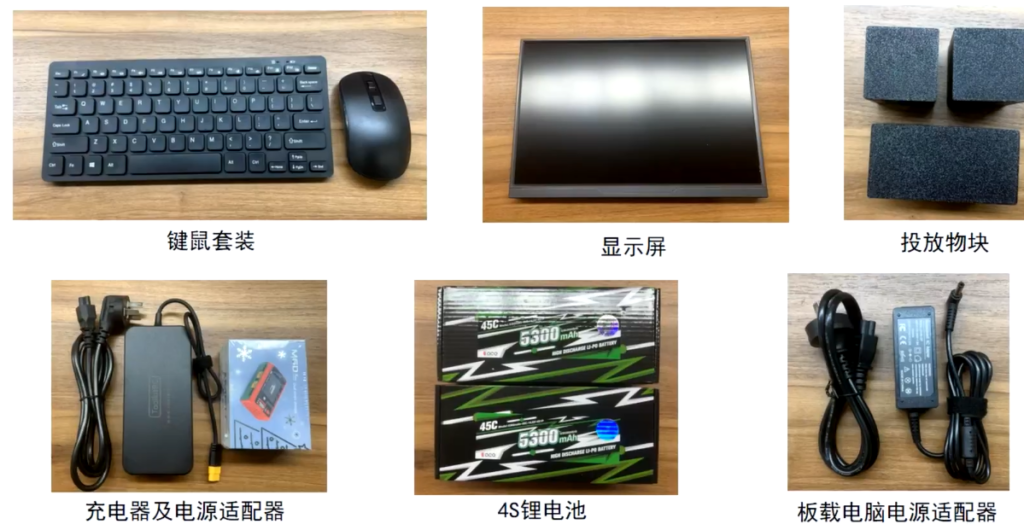
一、开箱检查设备是否齐全。
包含:无人机、遥控器(高频头以及天线)、调试用电源、充电器电源、充电器、电池(两块)、键鼠套装(包含接收机)、显示器、线缆接头(UsbTypeC数据线(黑)、UsbTypeC电源线(白)、HDMI线、DP转HDMI转接头)、消耗件(桨保一支*4套、桨叶正反一对*4套、物块*4)。

二、介绍充电器使用方法以及电池保养。
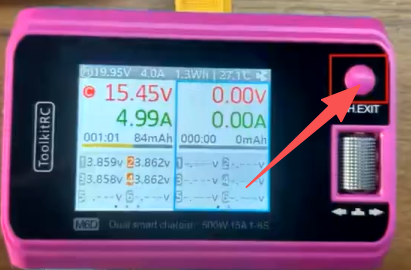
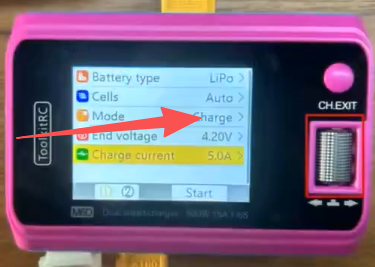
1.连接充电器电源到220V电源,将充电器电源XT60端接入到充电器,连接充电器与电池如图。


使用这个旋钮选择和按下旋钮确认。
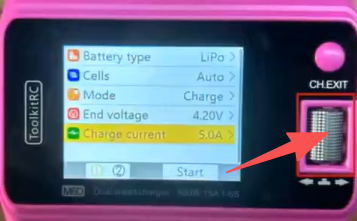
使用这个按钮在不同充电器通道的两块电池切换。
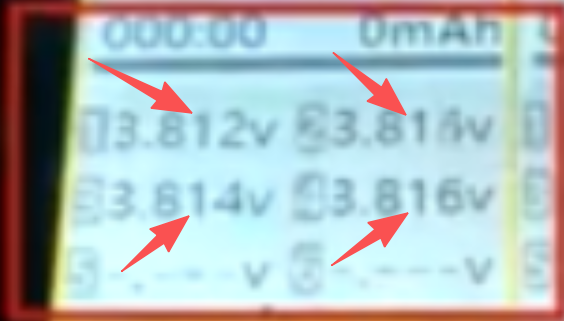
1.一般标配电池为4S锂铂聚合物电池,放空电池单个电芯电压3.6~3.7V、充满为4.1~4.2V、长时间不使用存储电压为3.85V。
2.充电器的三个模式:充电、放电、存储,使用之前将电池电量完全充满(单个电芯冲到4.2V),长时间不用时(计划超过12小时不使用)使用存储模式,充电器会自动冲放电到单颗电芯3.85V。警告:长时间将电池满电或者几乎放空状态存储会导致电池容量下降和鼓包。
三、遥控器的使用。
1. 遥控器介绍与操作说明
0 – 遥控器开关机按键:关机状态下,长按 3 秒启动遥控器;开机状态下,长按 3 秒关闭遥控器;启动中,按键为蓝色,启动成功后,按键为绿色,若启动后开关机按键为红色,表示摇杆或开关未处于初始状态,检查摇杆和开关,将其拨动回初始状态,开关机按键重新变为绿色;遥控器开关机按键为绿色状态时,TRS 高频头才会正常启动并接收遥控器信号;
1 – 遥控器通道 1:Roll 摇杆:控制无人机翻滚角度;
2 – 遥控器通道 2:Pitch 摇杆:控制无人机俯仰角度;
3 – 遥控器通道 3:Throttle 摇杆:控制无人机油门输出;
4 – 遥控器通道 4:Yaw 摇杆:控制无人机航向角度;
5 – 遥控器通道 5:遥控器三段开关按键,功能未定义,可自由使用;
6 – 遥控器通道 6:飞行模式切换三段开关:控制无人机飞行模式;打到最上方(图中所示位置)时,飞行模式对应自稳飞行模式(Stabilized);打到中间位置时,飞行模式对应定高飞行模式(Altitude);打到最下方位置时,飞行模式对应定点飞行模式(Position);
7 – 遥控器通道 7:紧急停止开关(Emergency Kill):按键弹起时,不触发紧急停止,按下按键时,绿灯亮起,触发紧急停止,电机停止转动,在一些紧急状况下可以使用,强制使飞机坠机;
8 – 遥控器通道 8:外部控制模式(offboard)切换按键:按下按键时,绿灯亮起,切换为外部控制模式(offboard);按下弹起时,按键绿光熄灭,退出外部控制模式。

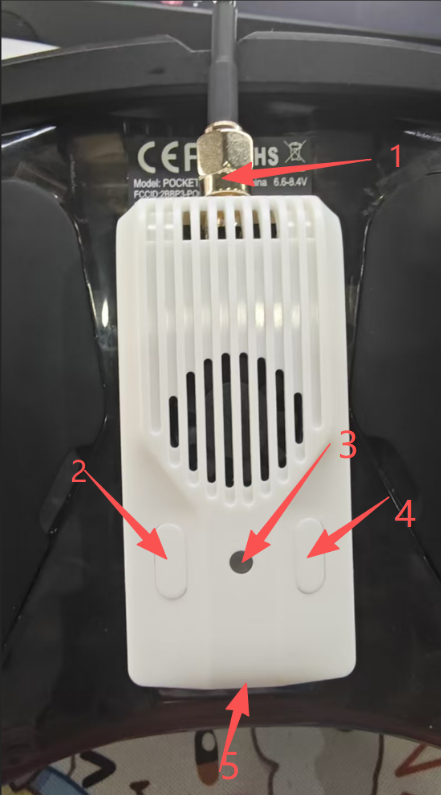
2-1. TRS款高频头操作说明与状态说明:
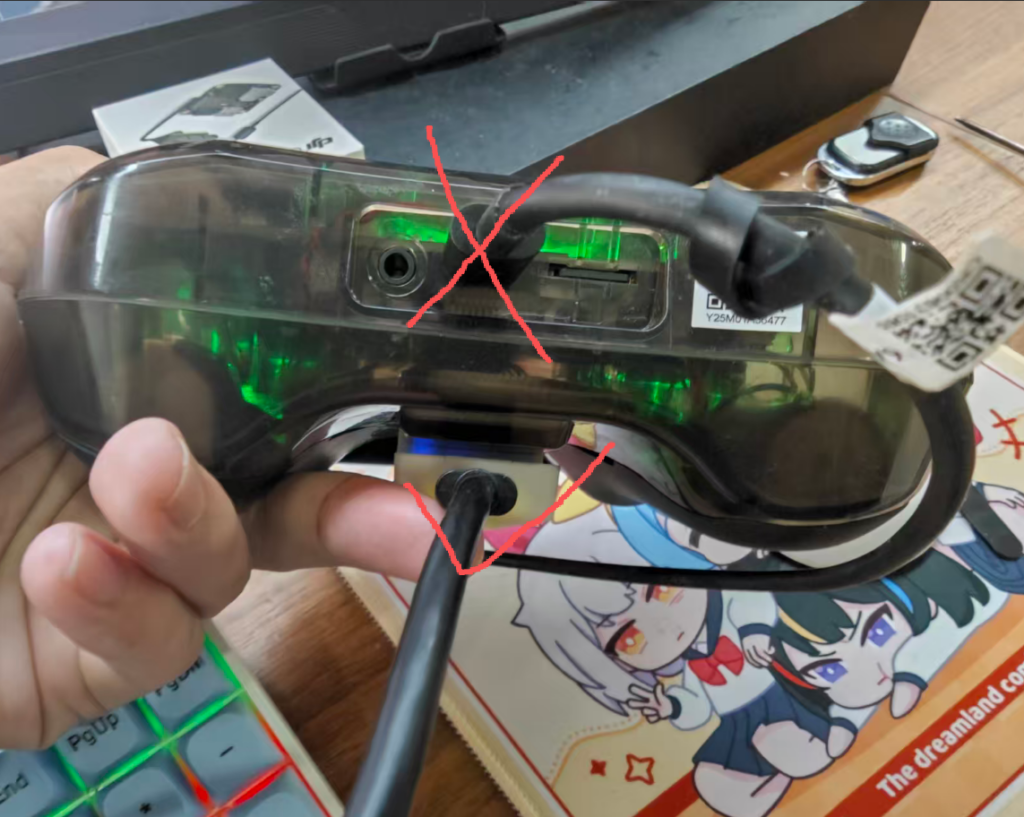
0 – 高频头天线,使用前,将遥控器配套天线拧紧到 SMA 接头上;
5 – 蓝牙连接指示灯:蓝灯长亮表示高频头蓝牙已连接;蓝灯熄灭表示高频头蓝牙未连接;
6 – Type-C 接口:用于将高频头连接到电脑,实现无人机与地面站的通信。

1 – TRS 接收机指示灯:绿灯长亮为已连接;绿灯慢闪为未连接;绿灯快闪为对频中;绿灯双闪为已连接,但无 Sbus 信号;
2 – TRS 接收机对频按键:按住按键同时给接收机上电后松开按键,接收机进入搜索对频模式(绿灯快闪)。
2-2. ELRS款高频头操作说明与状态说明:
1.遥控器介绍
1.sma天线接口,必须将遥控器配套天线拧紧到 SMA 接头上后才允许上电,否则有烧毁射频芯片的风险。
2.按钮1:可编程(默认为短按3次对频,长按0.5秒调整功率)
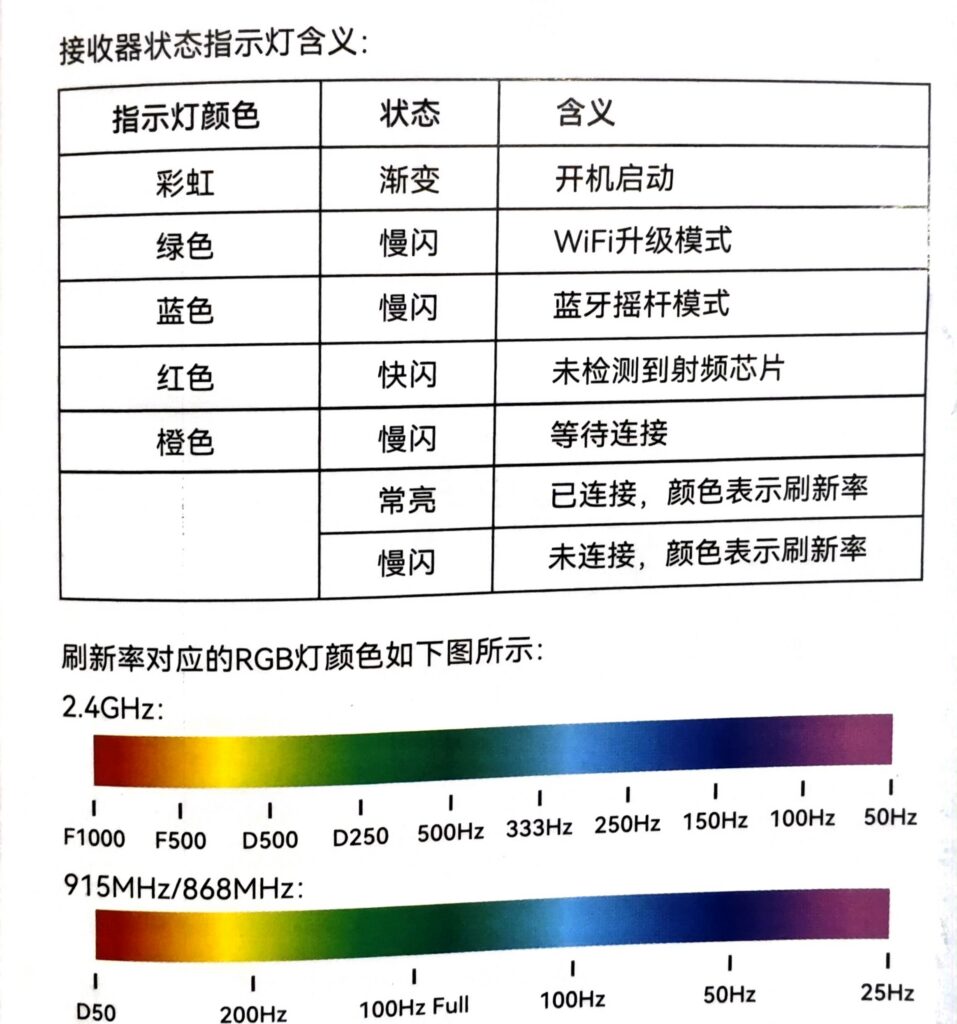
3.指示灯:参考下图
4.按钮2:(默认短按2次进入图传菜单,长按0.5秒发送图传设置)
5.Type-C 接口:用于将高频头连接到电脑,实现无人机与地面站的通信,同时也是高频头线刷烧录接口。
2.接收机
接收机指示灯:
快闪,对频失败,进入WiFi模式;
慢闪,等待对频;
常亮,对频成功。
接收机进入对频模式操作:快速让无人机上电并且断电3次后接收机进入对频模式。
四、无人机首次开机与测试。
在新版Magpie360系列无人机镜像中,添加了使用RustDesk远程桌面的方案。
所需工具下载链接https://static.simuro.liuyaorobot.com/archive/rustdesk-1.4.5-x86_64.exe
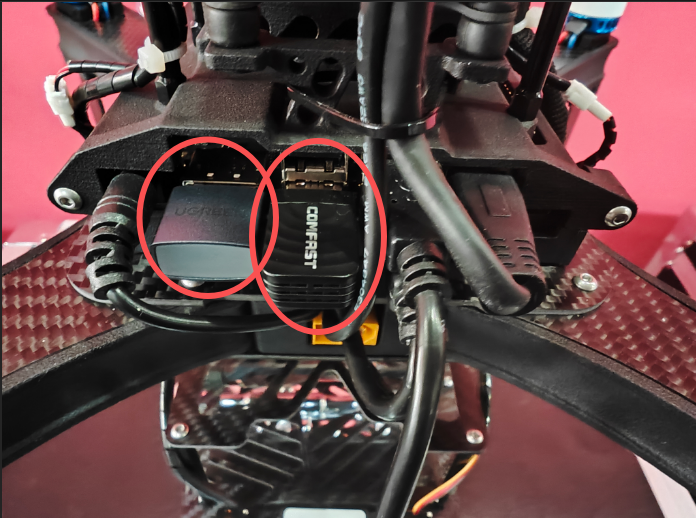
第一步、安装无人机网卡以及屏幕诱骗器
第二步、启动无人机电源连接无人机热点
随后,将连接到无人机热点magpie-xxxx,默认密码为无人机序列号后8位。
无人机wifi名称为:magpie-xxxxxx,密码为飞行器序列号后8位(可见飞行器下方,遥控器后方,箱子上)

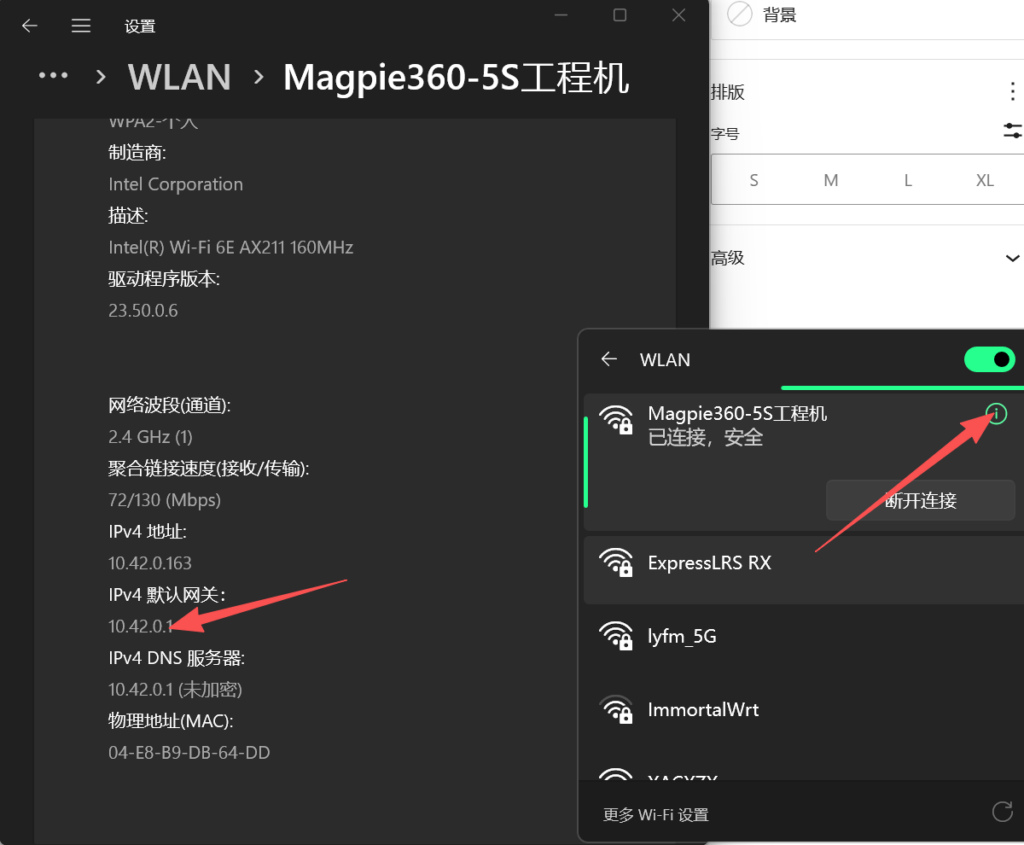
随后查看无人机ip,如图是10.42.0.1
第二步、连接无人机
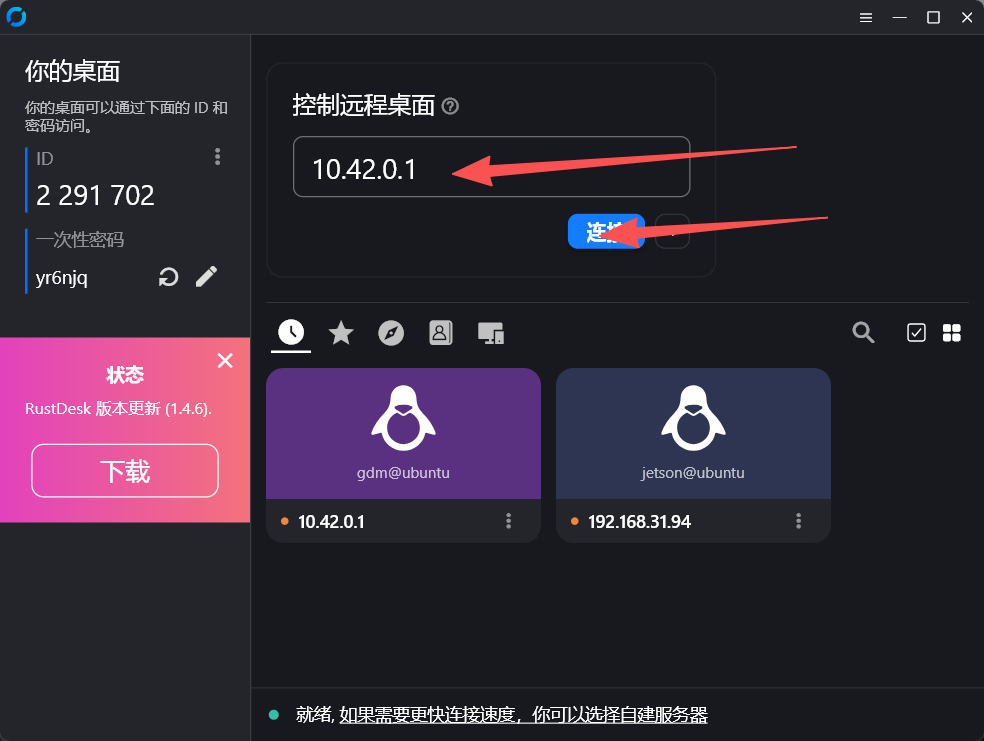
2.打开rustdesk的桌面版,输入IP后点击连接
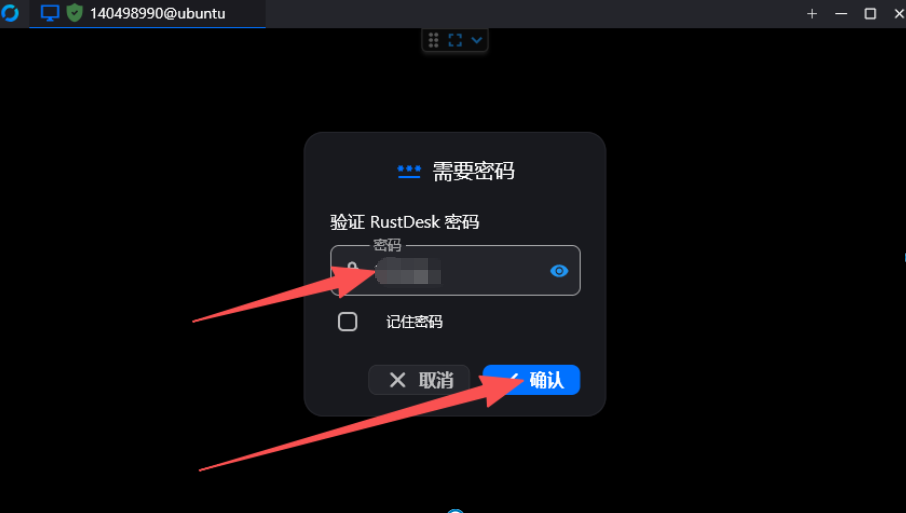
3.输入设置的远程密码(默认为Jetson88)完成连接
4.输入系统密码(默认是jetson),进入桌面
1.首先请拆除全部桨叶。
2.启动遥控器,随后安装无人机电池、键鼠、显示器。
3.使用键鼠配置无人机连接到手机热点或者路由器AP,查看无人机在网络的IP地址,使用电脑ssh工具连接上无人机的ssh,并且保存ssh配置到电脑。可参考:https://docs.liuyaorobot.com/?docs=%e8%bd%af%e7%a1%ac%e4%bb%b6%e8%bd%af%e7%a1%ac%e4%bb%b6%e7%8e%af%e5%a2%83%e5%8f%8a%e8%bf%9c%e7%a8%8b%e6%96%b9%e6%a1%88%e8%bd%af%e7%a1%ac%e4%bb%b6/ssh%e4%b8%8b%e8%bd%bd%e4%b8%8e%e9%85%8d%e7%bd%ae%ef%bc%88bitvise-ssh-client%ef%bc%89
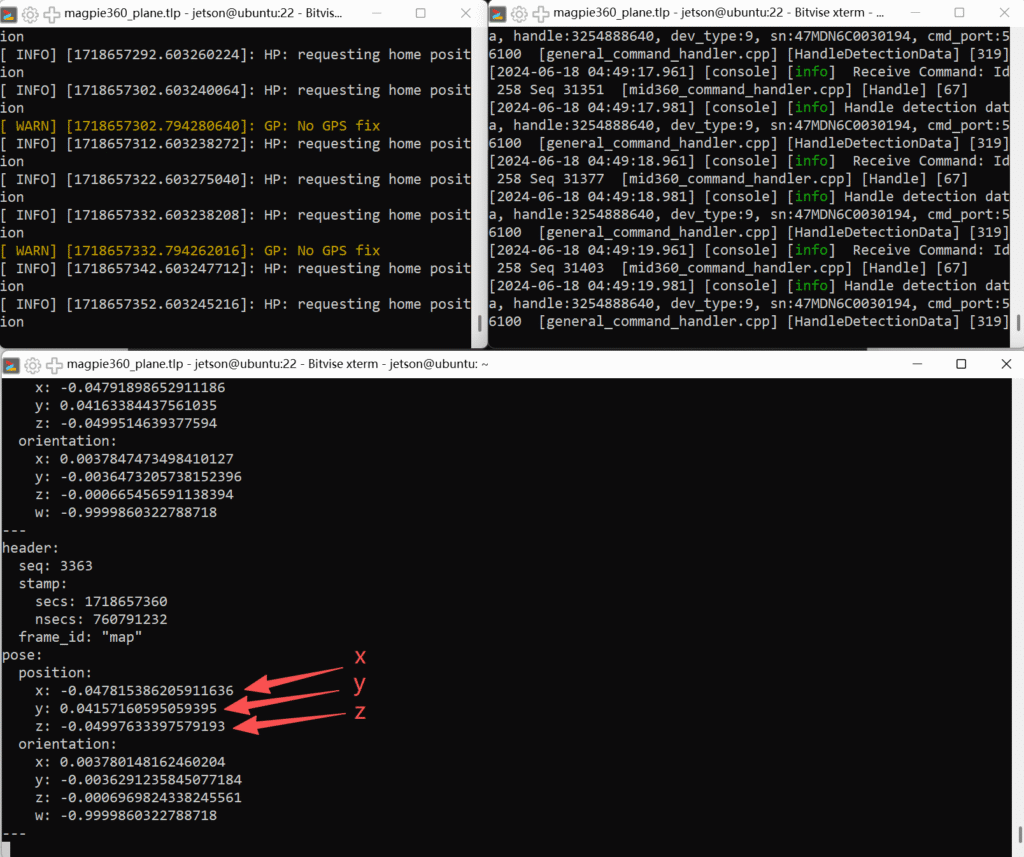
4.「 激光雷达测试 」分别启动三个终端窗口,分别输入以下三条指令使用指令查看无人机激光雷达定位是否正常。可参考:https://docs.liuyaorobot.com/?docs=%e6%89%8b%e5%8a%a8%e9%a3%9e%e8%a1%8c%e5%8f%8a%e8%87%aa%e5%8a%a8%e6%8e%a7%e5%88%b6%e9%a3%9e%e8%a1%8c/%e6%97%a0%e4%ba%ba%e6%9c%ba%e5%ae%9a%e7%82%b9%e6%93%8d%e4%bd%9c%e6%b5%81%e7%a8%8b%ef%bc%88%e5%9d%90%e6%a0%87%e7%a1%ae%e8%ae%a4-%e6%89%8b%e5%8a%a8%e9%a3%9e%e8%a1%8c%ef%bc%89
roslaunch tutorial_basic mavros.launch
roslaunch tutorial_navigation mid360.launch
rostopic echo /mavros/local_position/pose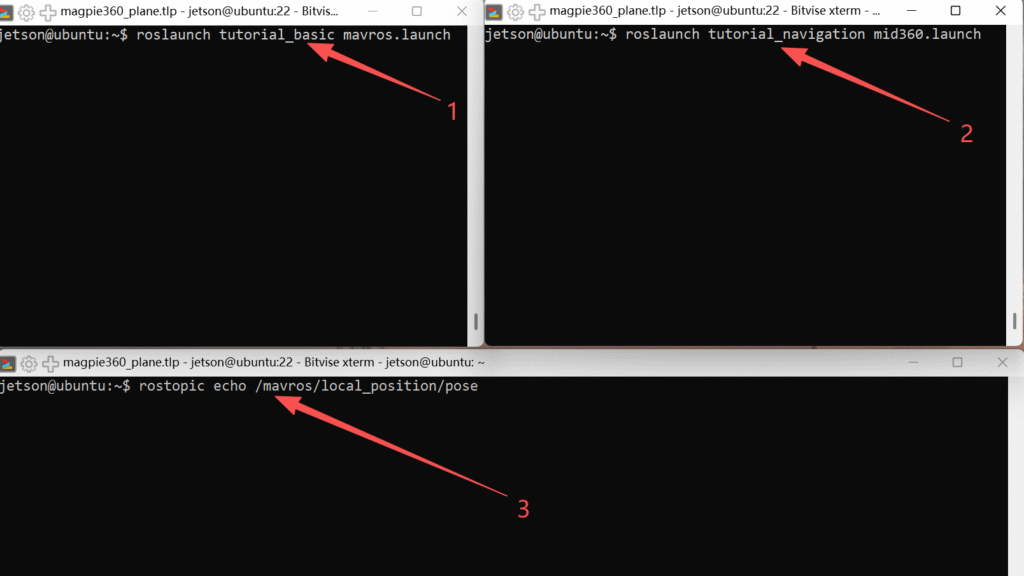
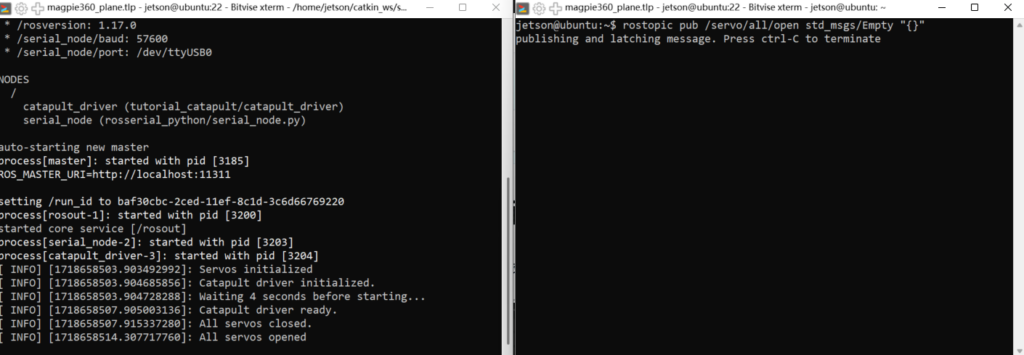
5.「 投放机构测试」新建两个终端,并且在第一个输入:
roslaunch tutorial_catapult catapult_driver.launch打开全部投放舵机在第二个终端输入:
rostopic pub /servo/all/open std_msgs/Empty "{}"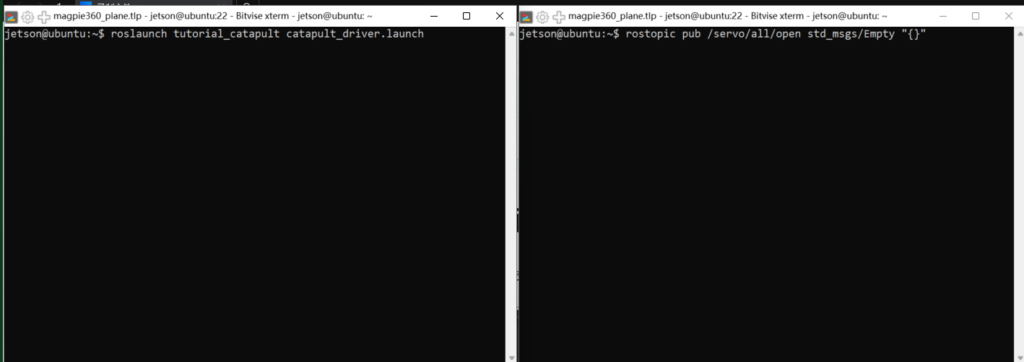
关闭全部投放舵机在第二个终端输入:
rostopic pub /servo/all/close std_msgs/Empty "{}"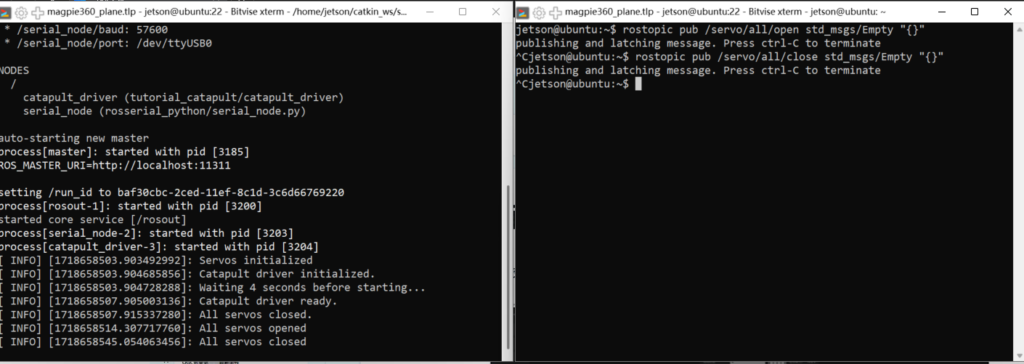
6.拆除电池,使用数据线连接到无人机。
7.「 无人机飞控校准」打开地面站并且执行校准流程:陀螺仪、加速度计、罗盘、电调(电调校准需要点击启动后插入电池)。
1)打开 QGC 地面站,使用 USB 线将飞控连接到电脑上,QGC 会自动识别到飞控,并建立连接。
远程调参教学
1.将数据线接入高频头数据口,另一端连接到电脑。(不要插到充电接口)
2.下载软件并且打开软件,六爻elrs对QGC兼容适配软件链接: static.simuro.liuyaorobot.com/archive/六爻ELRS适配工具.exe
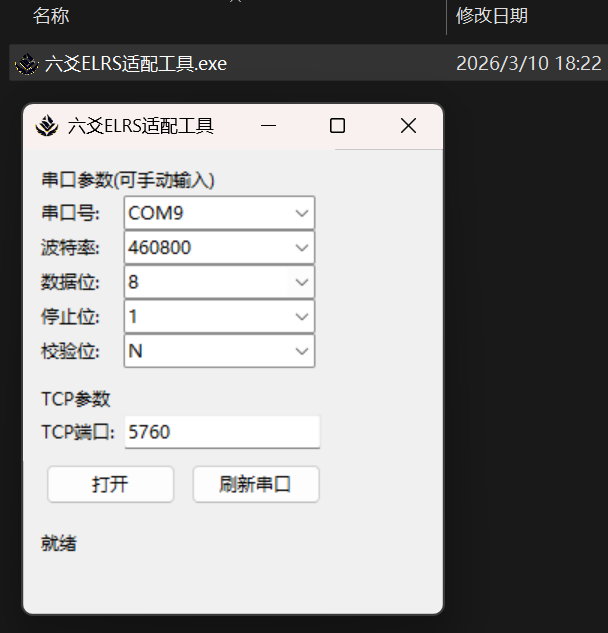
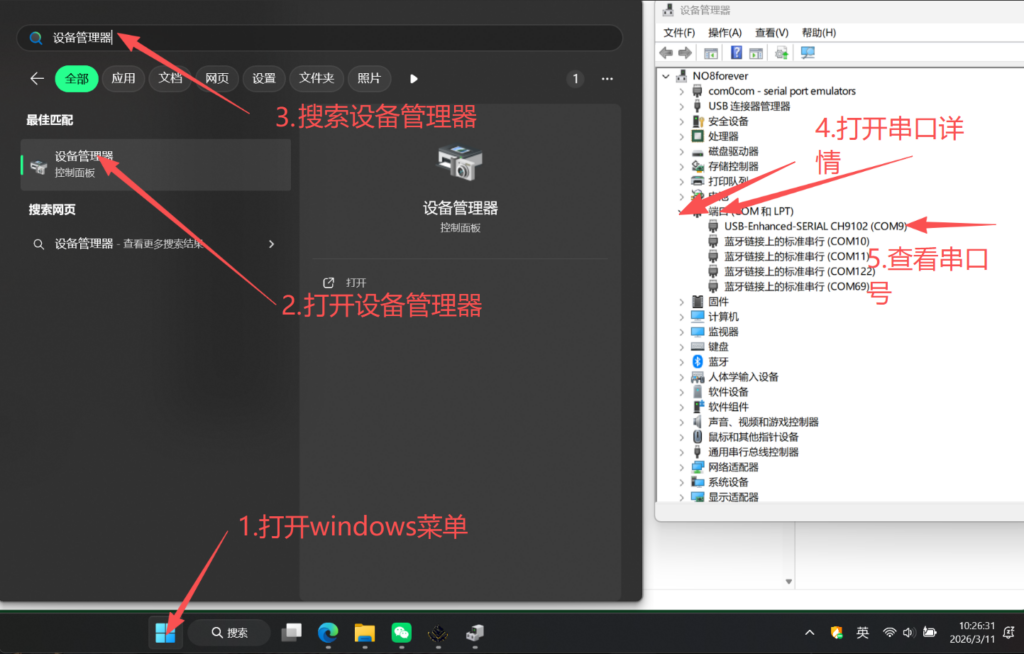
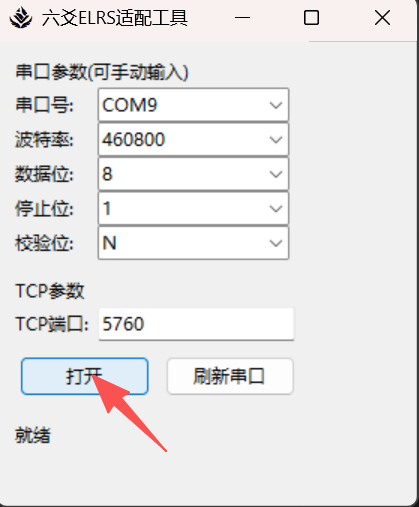
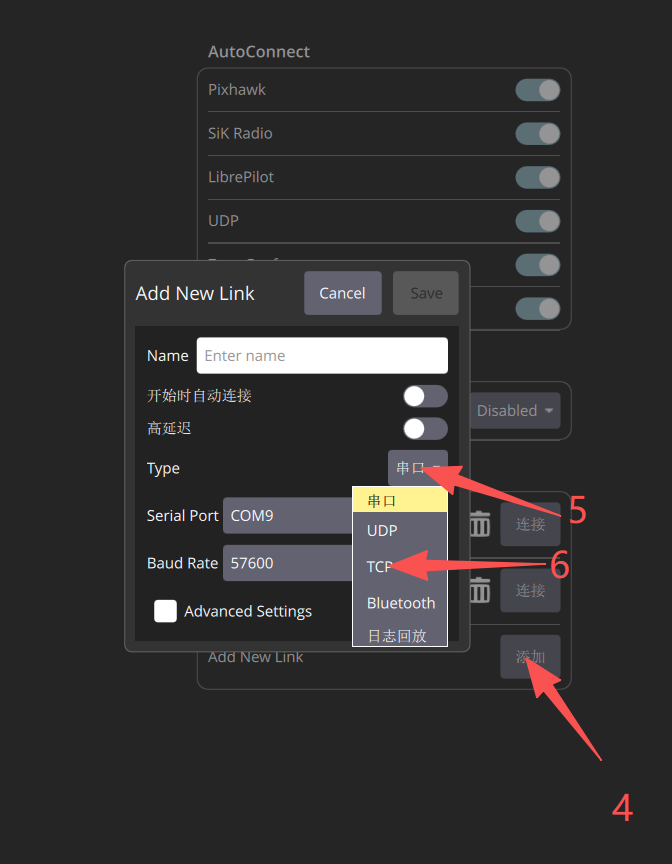
3.打开 设备管理器 查看高频头串口号,如图是COM9(不同人的CH9102串口号可能不同)
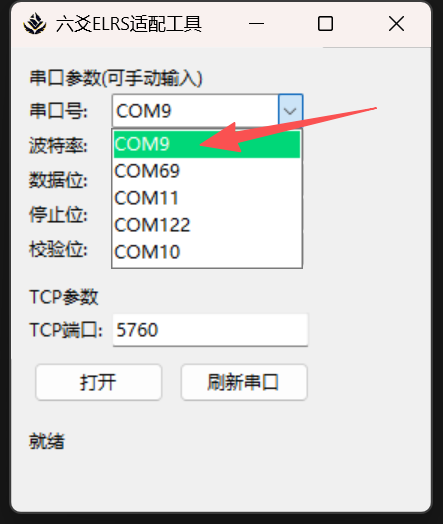
4.选择找到的高频头串口,如图是COM9
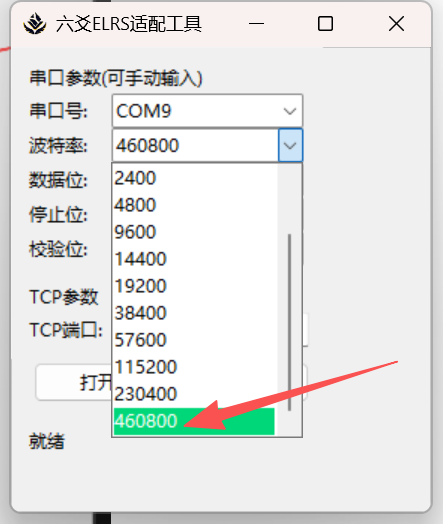
5.选择波特率460800
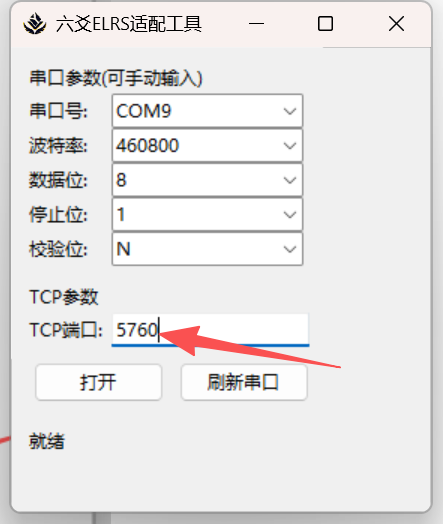
6.TCP端口号选择5760
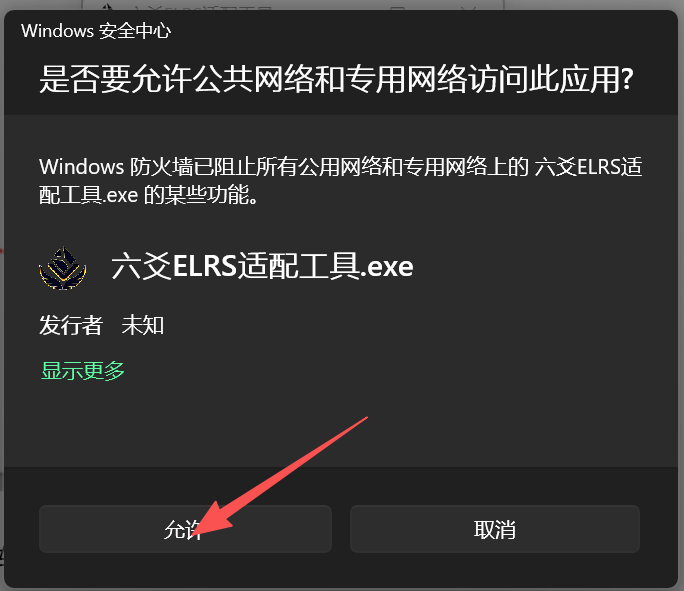
7.点击打开串口并且同意防火墙以及安全软件(杀毒软件)
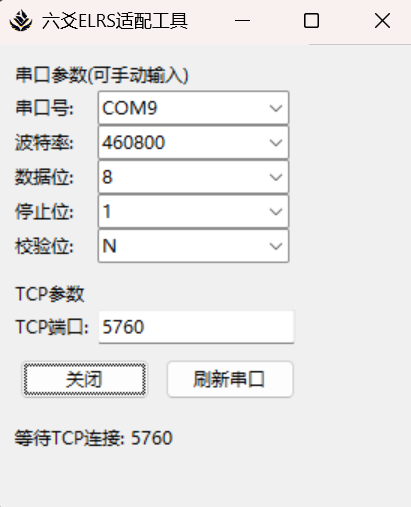
8.如图已经成功启动
9.打开QGC地面站,选择添加手动连接
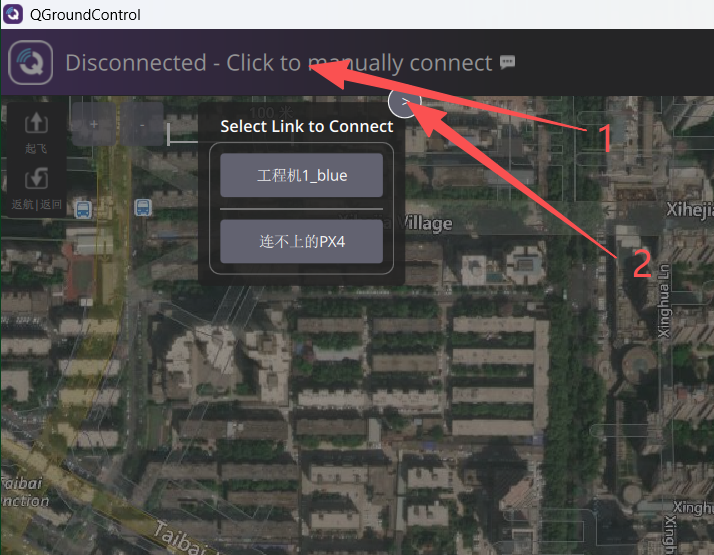
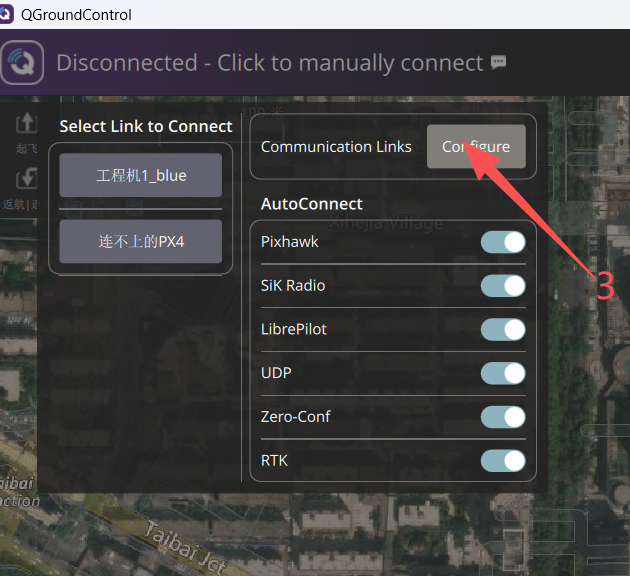
10.选择添加TCP连接
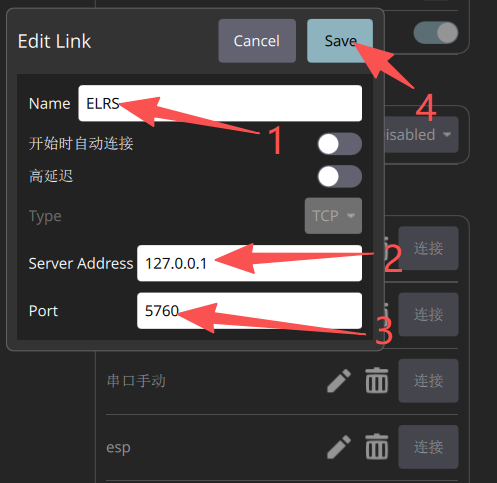
11.输入连接名字ELRS,打开高延迟选项,ip输入127.0.0.1,端口号选择5760,点击保存。
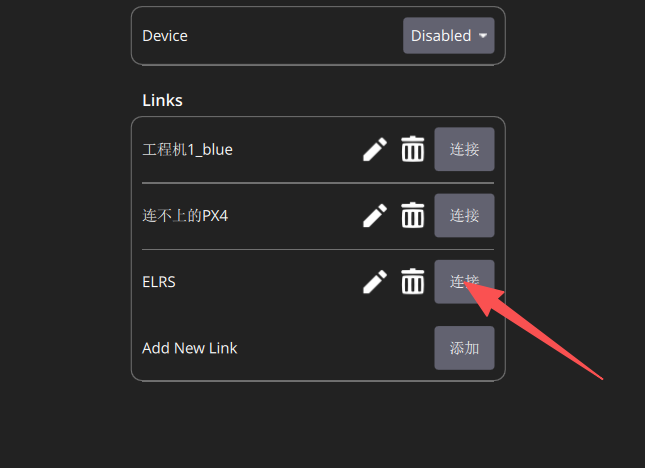
12.点击连接
13.返回到主页
14.连接完成
2)点击 QGC 界面左上方的 LOGO,再点击弹出来的窗口中的 Vehicle Setup 按钮,进入设置界面。

3)进入地面站设置后点击左侧导航栏中传感器选项。
4)点击第一项罗盘并确定,开始进行罗盘校准,按照提示给的方向转动无人机,等待指示框变绿切换到下一个姿态,直到校准完六个姿态。

5)点击第二项陀螺仪并确定,等待读条结束显示校准完毕即表明校准完成。

6)点击第三项加速度计并确定,按照提示给出的方向静置无人机,等待指示框变绿切换到下一个姿态,直到校准完六个姿态。

7)点击第四项校平地平线并确定,等待读条结束即表明校准完成。

8)校准完成后需按照如下操作重启飞行器,否则可能导致校准不生效。

警告,这一步属于高风险操作,请在开始前拆除桨叶!!!
9)确定在不安装电池的情况下点击电调校准(电源>电调校准)
警告,请再次确认桨叶已经全部拆除!!!
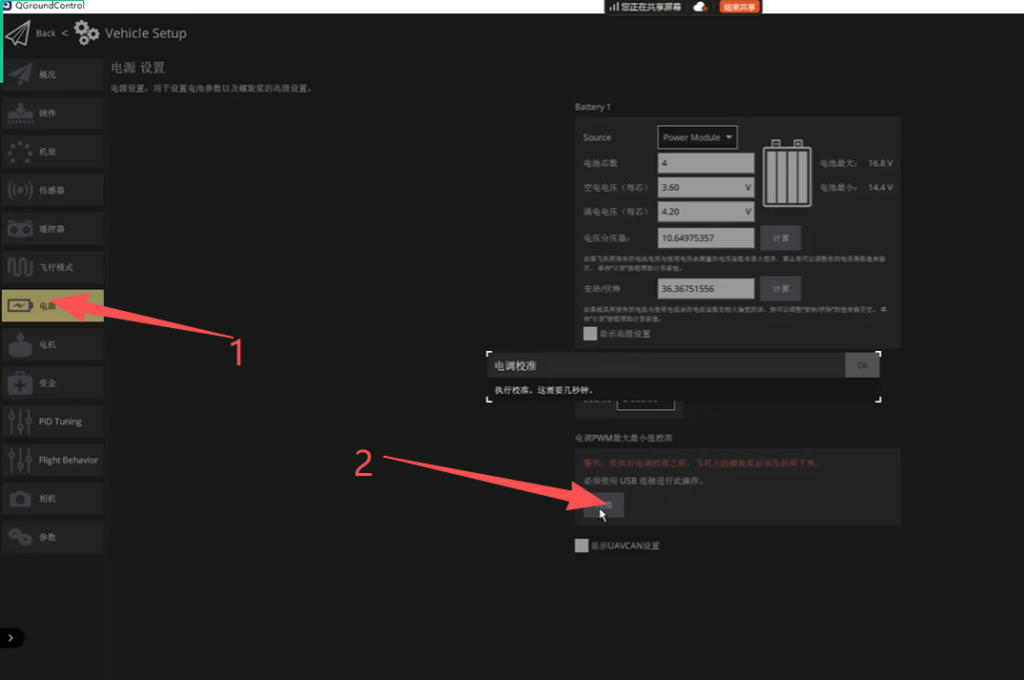
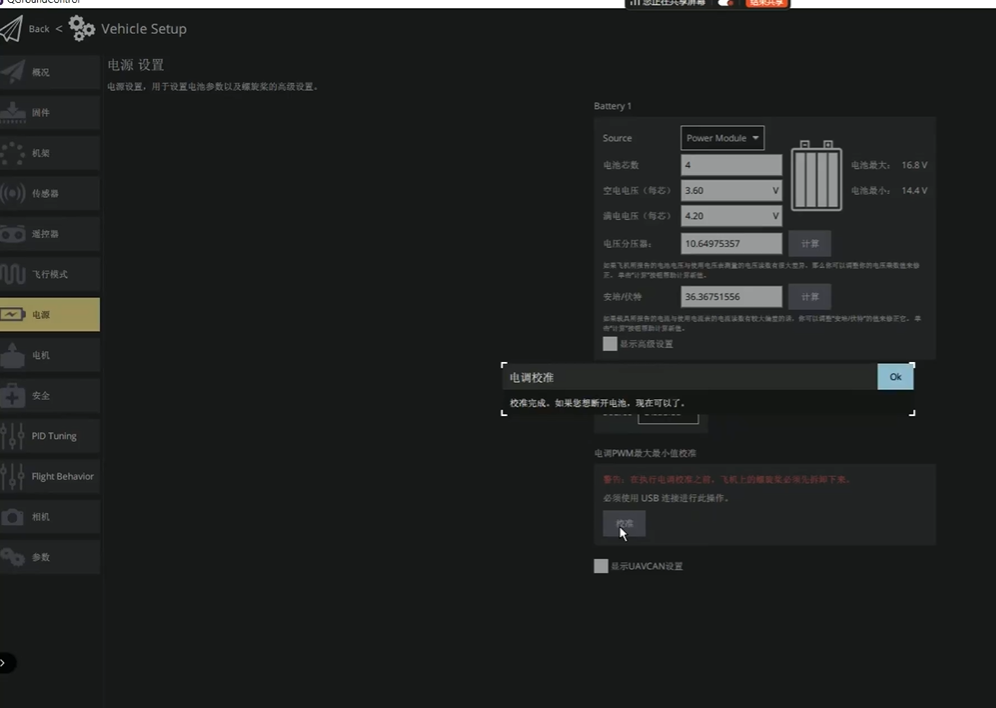
10)在点击「 电调校准」按钮后30秒内插上电池,直到出现如图所示表明校准成功,此时拔掉电池。
五、无人机首次飞行与测试。
1.桨叶安装方向:

2.确保遥控器已经开机并且正确设置,安装好桨叶和电池,按下无人机GPS上的解锁按钮,将无人机放置在场地内。

如图确保按下遥控器左侧急停按钮指示灯到亮起状态。(每次按下时无人机会发出急停提示音,请务必听清楚提示音是否来自目前正在控制的无人机,防止意外)

3.启动一个终端并且输入
在启动此指令前请务必确认遥控器急停按钮指示灯已经亮起,否则可能导致严重事故。
roslaunch tutorial_basic run_vel_control.launch请务必移除全部与飞行器连接的电缆(如屏幕与有线款键盘鼠标等等),人员务必撤离到隔离区或隔离网棚外。
请再次确认人员已经撤离到隔离网外,如图按下急停按钮指示灯到熄灭状态。

无人机将起飞(不进行方向控制),随后向前飞行1米并且旋转降落(期间可以手动接管)。
4.手动接管
如图所示左侧按钮指示灯亮起则为机载电脑自动驾驶模式。

如图左侧按钮指示灯熄灭则为手动操纵模式。
