软件包下载:static.simuro.liuyaorobot.com/archive/catkin_ws_2026.tar
1.进入主目录,将文件夹catkin_ws删除。
cd ~/
sudo rm -Rf catkin_ws
2.导入catkin_ws_2026.tar到主目录后,在
cd ~/
路径打开命令行,使用命令
tar xvf catkin_ws_2026.tar
解压(注意:不能在文件管理器使用右键菜单提取)
3. 进入catkin_ws,使用命令`catkin_make`构建工作空间
cd catkin_ws catkin_make
4. 运行命令安装缺失软件
sudo apt install xmlstarlet
若出现no module name pyzbar,则在命令行运行pip install pyzbar,安装完后即可解决
5.修改环境变量
在~/.bashrc中添加export GAZEBO_SIMULATION=1
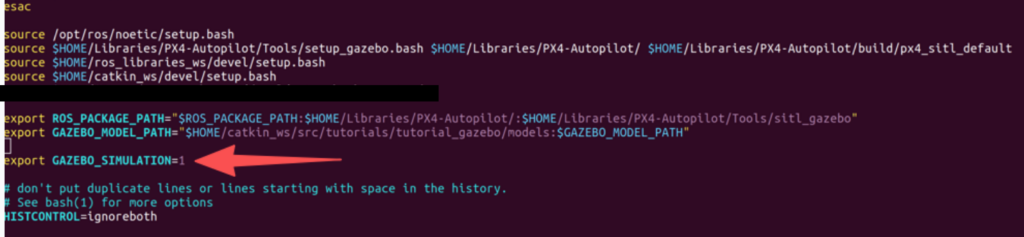
sudo echo 'export GAZEBO_SIMULATION=1' >> ~/.bashrc
7.测试,关闭全部命令行终端,重新打开两个命令行终端。
#在第一个命令行输入
roslaunch tutorial_gazebo sim_craic2026.launch
#在第二个命令行输入
roslaunch tutorial_basic run_vel_control.launch
补充说明:
1. 启动gazebo后在rviz中并不会显示点云,需要启动fastlio相关节点后才会在rviz中显示点云数据。
2.虚拟机仿真卡顿请调大虚拟机核心数量和允许的运行内存大小,推荐使用rostogo或者双系统进行仿真。
3.CUDA配置教程(没有nvidia显卡或在虚拟机中无法配置)根据提示安装,在镜像中下载cuda安装文件
命令行执行sudo sh cuda_12.8.1_570.124.06_linux.run