1. 遥控器介绍与操作说明
0 – 遥控器开关机按键:关机状态下,长按 3 秒启动遥控器;开机状态下,长按 3 秒关闭遥控器;启动中,按键为蓝色,启动成功后,按键为绿色,若启动后开关机按键为红色,表示摇杆或开关未处于初始状态,检查摇杆和开关,将其拨动回初始状态,开关机按键重新变为绿色;遥控器开关机按键为绿色状态时,TRS 高频头才会正常启动并接收遥控器信号;
1 – 遥控器通道 1:Roll 摇杆:控制无人机翻滚角度;
2 – 遥控器通道 2:Pitch 摇杆:控制无人机俯仰角度;
3 – 遥控器通道 3:Throttle 摇杆:控制无人机油门输出;
4 – 遥控器通道 4:Yaw 摇杆:控制无人机航向角度;
5 – 遥控器通道 5:遥控器三段开关按键,功能未定义,可自由使用;
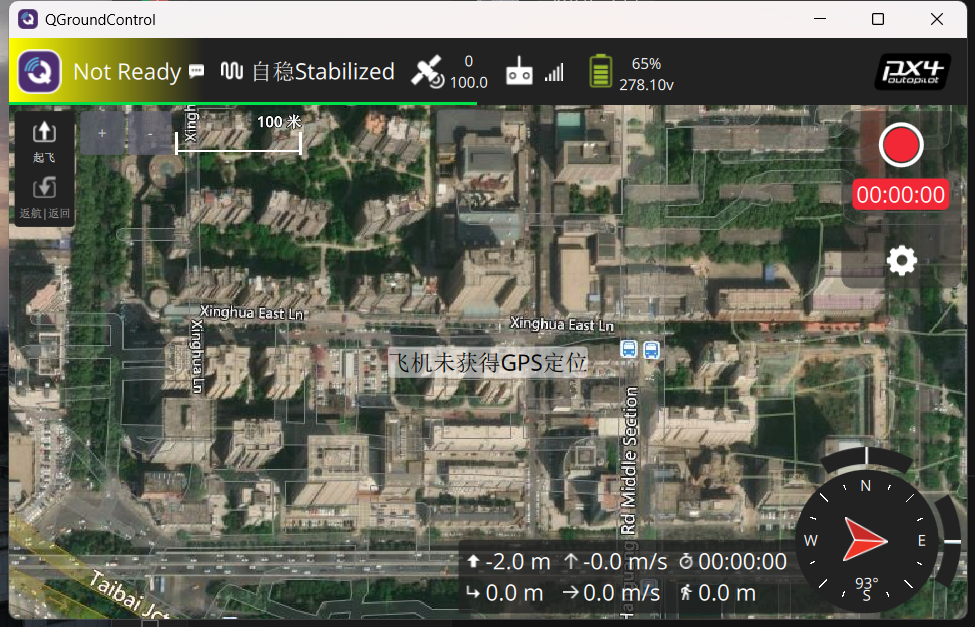
6 – 遥控器通道 6:飞行模式切换三段开关:控制无人机飞行模式;打到最上方(图中所示位置)时,飞行模式对应自稳飞行模式(Stabilized);打到中间位置时,飞行模式对应定高飞行模式(Altitude);打到最下方位置时,飞行模式对应定点飞行模式(Position);
7 – 遥控器通道 7:紧急停止开关(Emergency Kill):按键弹起时,不触发紧急停止,按下按键时,绿灯亮起,触发紧急停止,电机停止转动,在一些紧急状况下可以使用,强制使飞机坠机;
8 – 遥控器通道 8:外部控制模式(offboard)切换按键:按下按键时,绿灯亮起,切换为外部控制模式(offboard);按下弹起时,按键绿光熄灭,退出外部控制模式。

2.ELRS款高频头操作说明与状态说明:
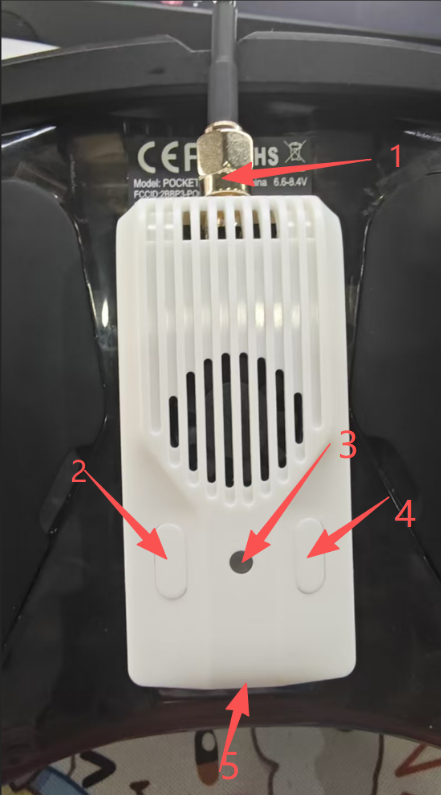
1.sma天线接口,必须将遥控器配套天线拧紧到 SMA 接头上后才允许上电,否则有烧毁射频芯片的风险。
2.按钮1:可编程(默认为短按3次对频,长按0.5秒调整功率)
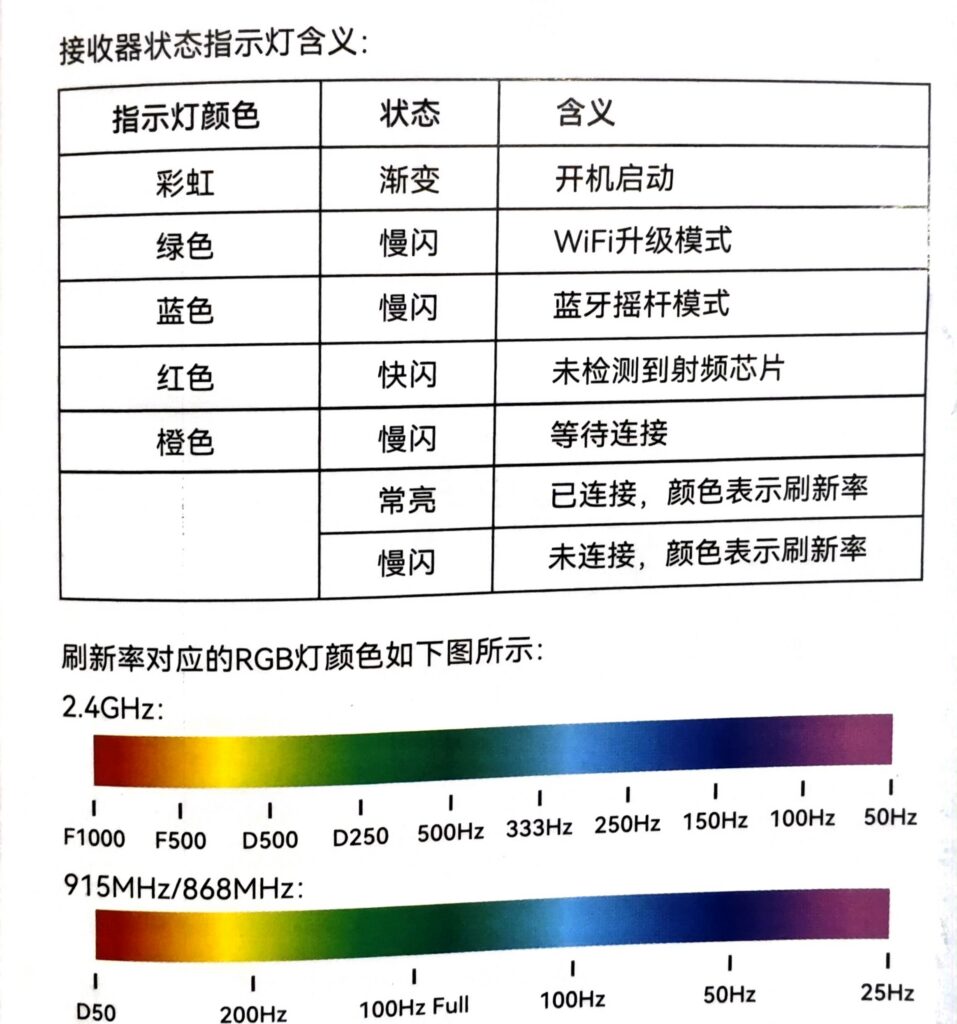
3.指示灯:参考下图
4.按钮2:(默认短按2次进入图传菜单,长按0.5秒发送图传设置)
5.Type-C 接口:用于将高频头连接到电脑,实现无人机与地面站的通信,同时也是高频头线刷烧录接口。
3.ELRS款接收机操作说明与状态说明
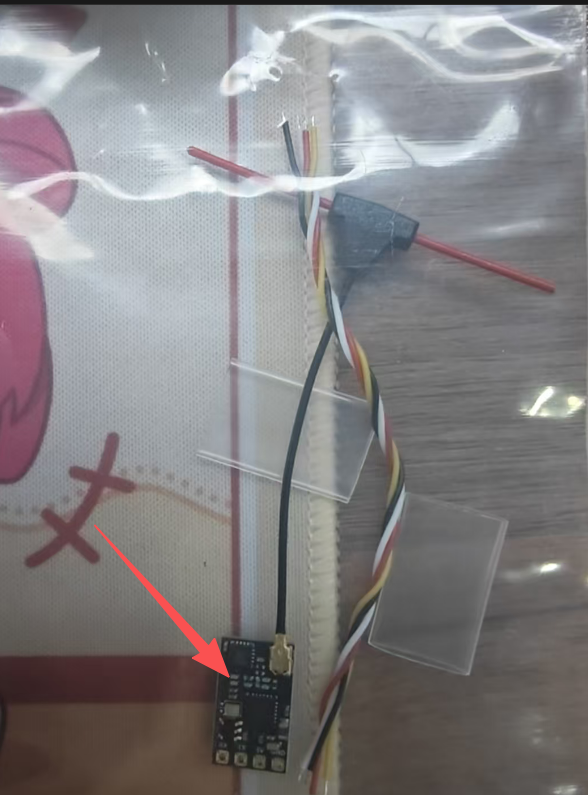
接收机指示灯:
快闪,对频失败,进入WiFi模式;
慢闪,等待对频;
常亮,对频成功。
接收机进入对频模式操作:快速让无人机上电并且断电3次后接收机进入对频模式。
4.远程调参教学
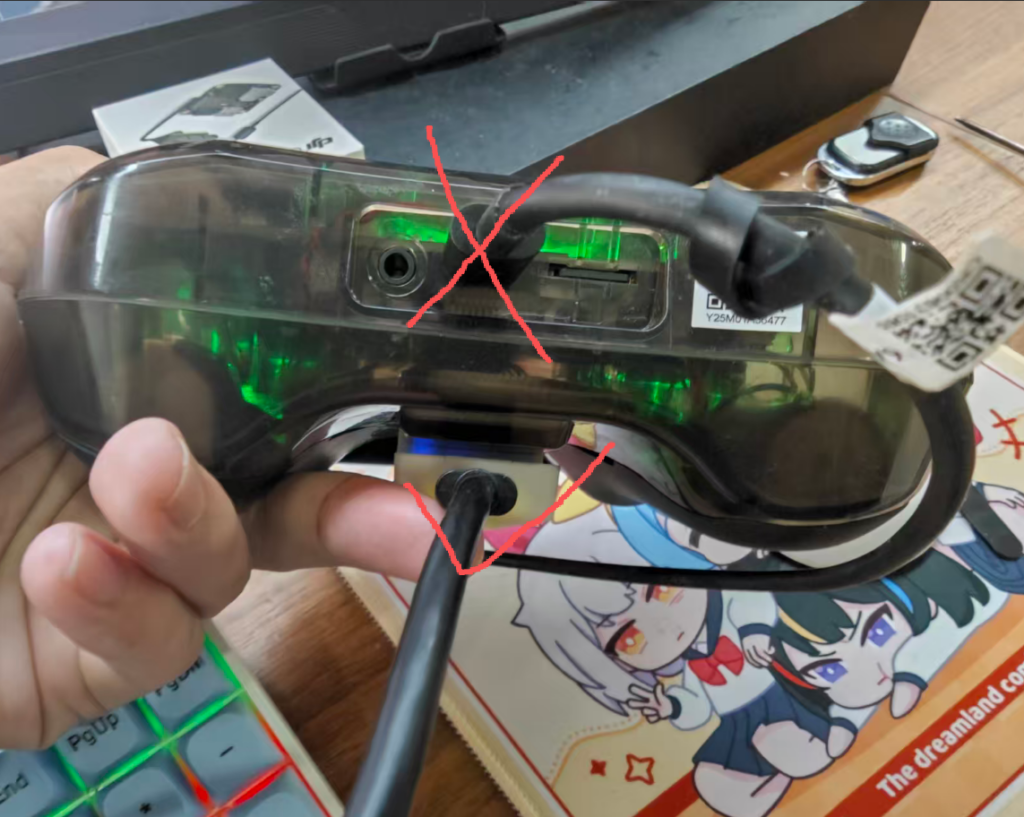
1.将数据线接入高频头数据口,另一端连接到电脑。(不要插到充电接口)
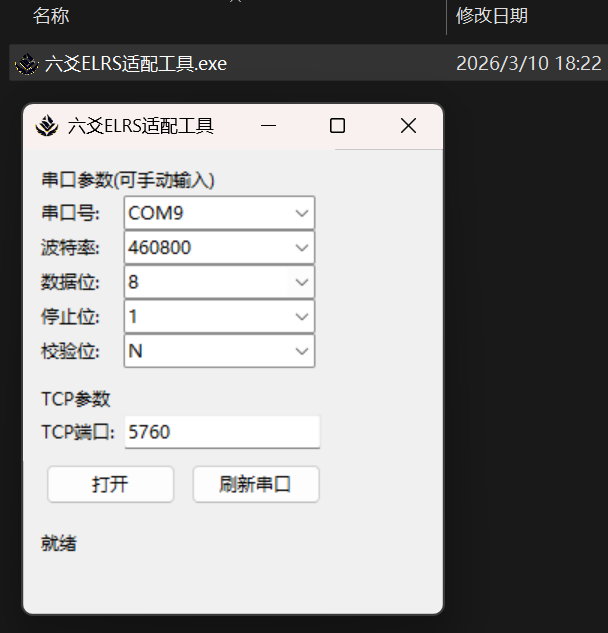
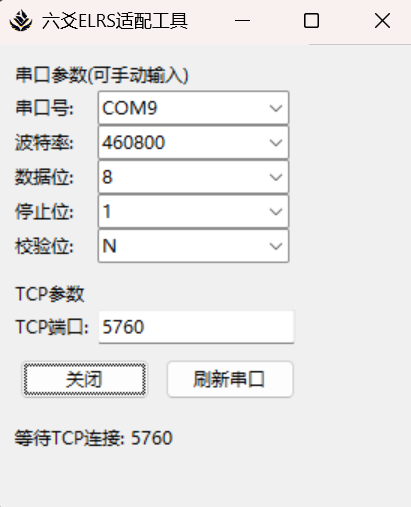
2.下载软件并且打开软件,六爻elrs对QGC兼容适配软件链接: static.simuro.liuyaorobot.com/archive/六爻ELRS适配工具.exe
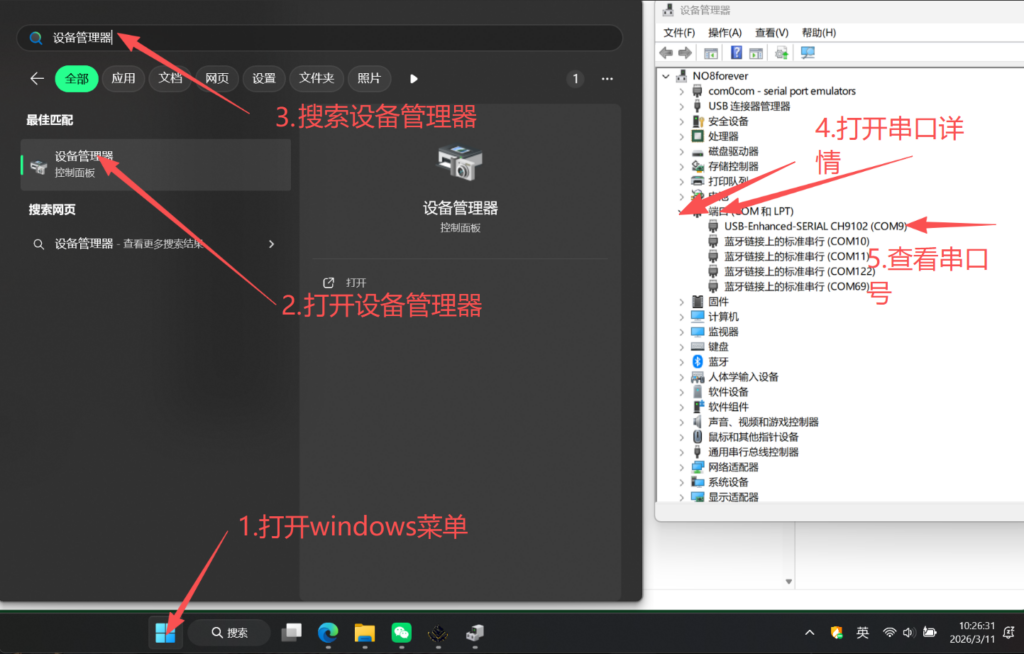
3.打开 设备管理器 查看高频头串口号,如图是COM9(不同人的CH9102串口号可能不同)
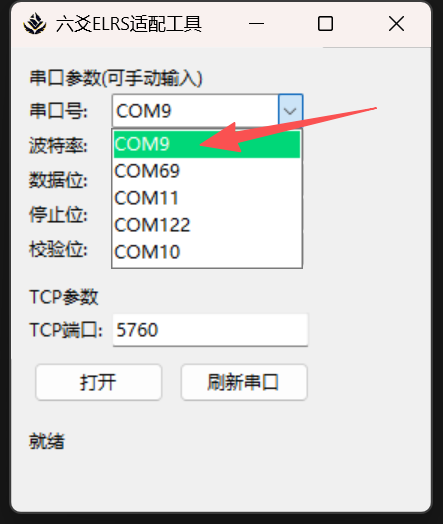
4.选择找到的高频头串口,如图是COM9
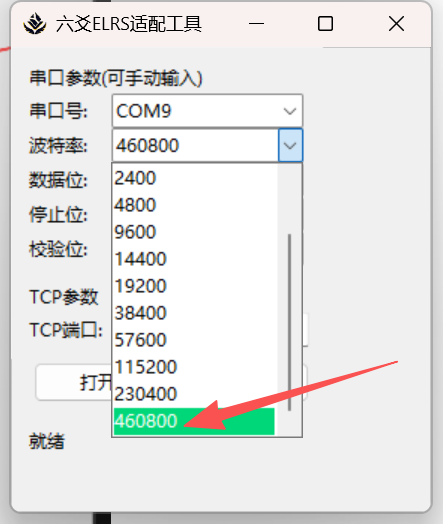
5.选择波特率460800
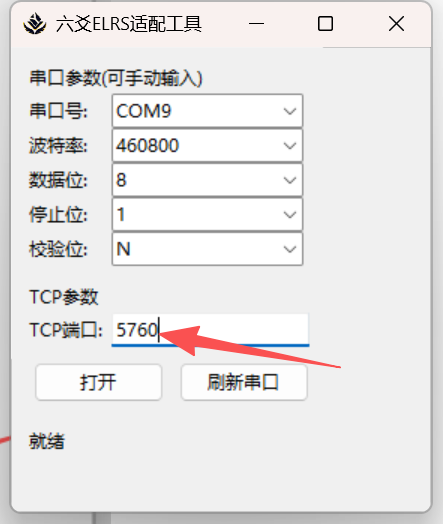
6.TCP端口号选择5760
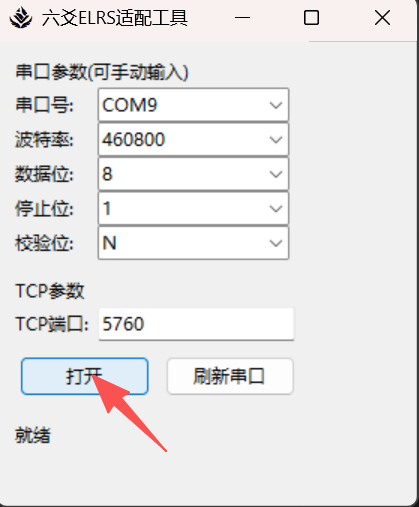
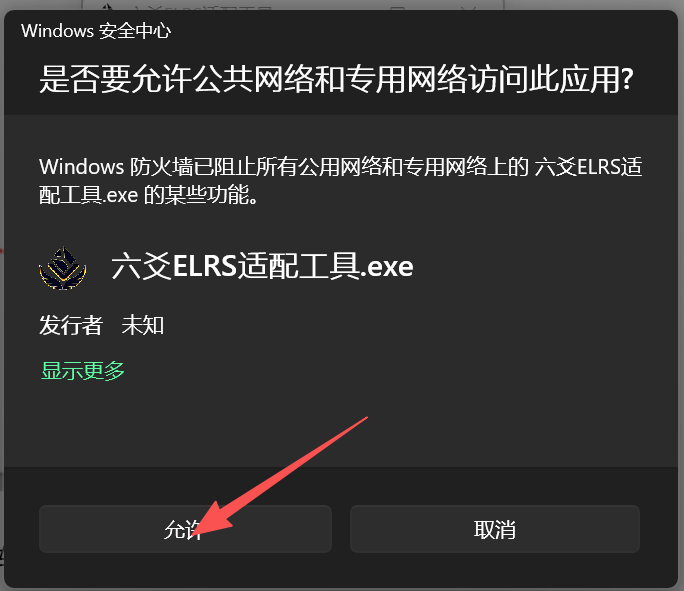
7.点击打开串口并且同意防火墙以及安全软件(杀毒软件)
8.如图已经成功启动
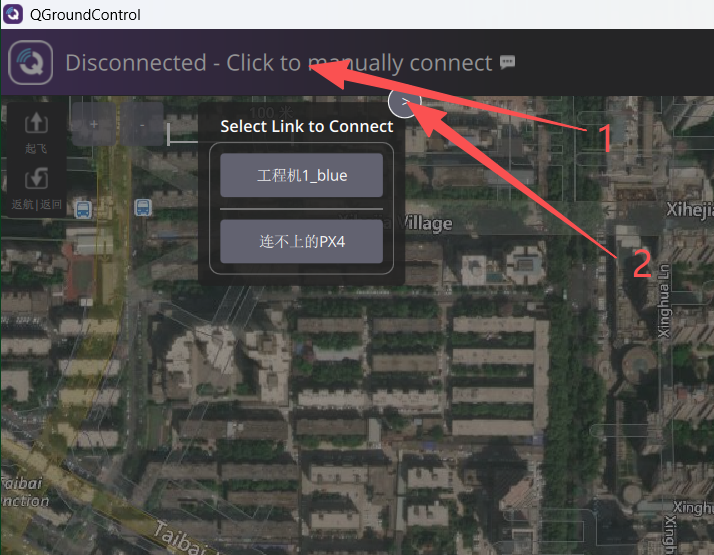
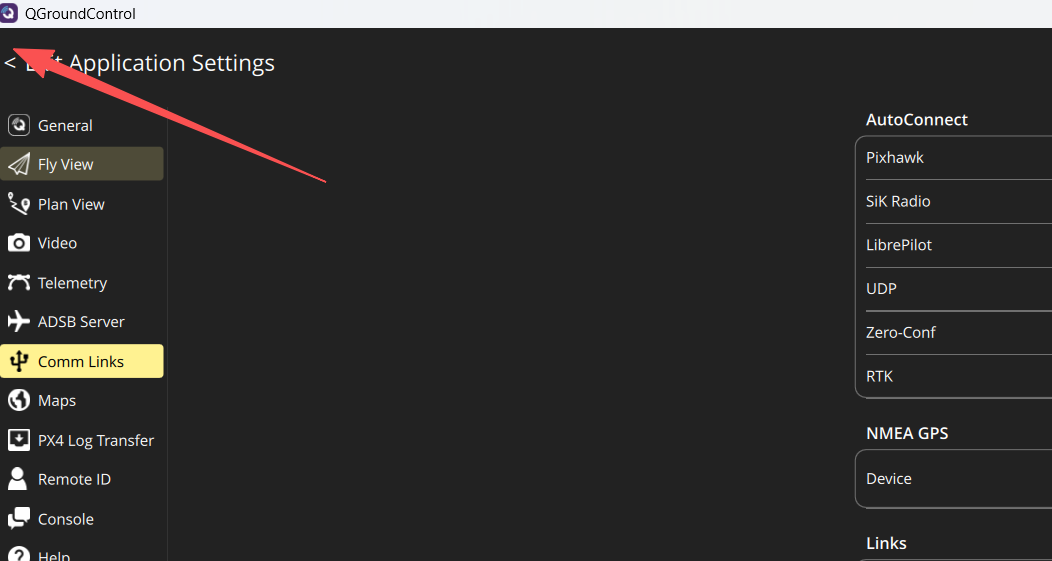
9.打开QGC地面站,选择添加手动连接
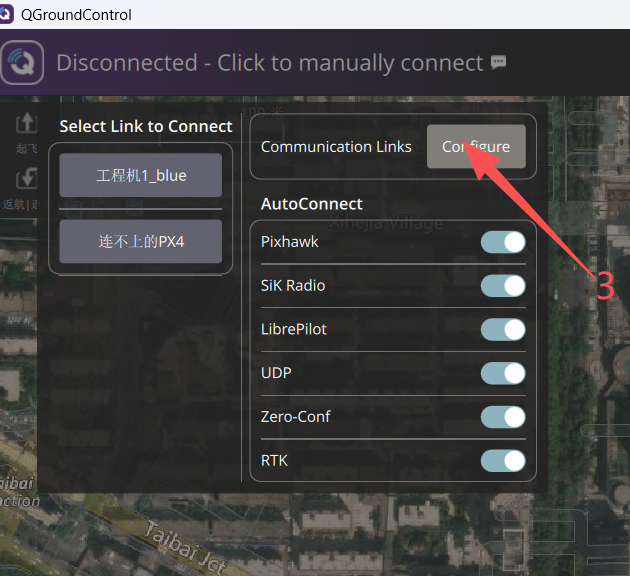
10.选择添加TCP连接
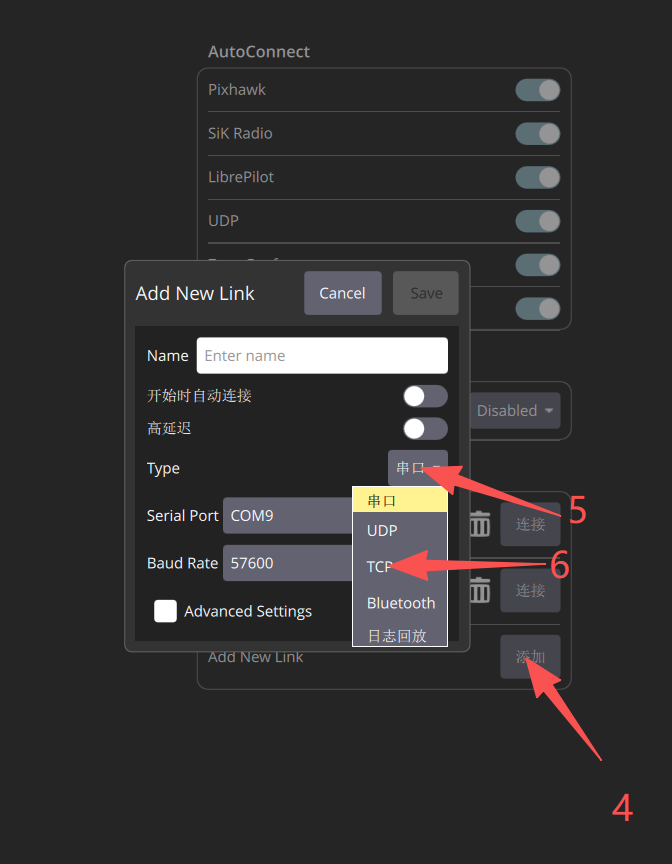
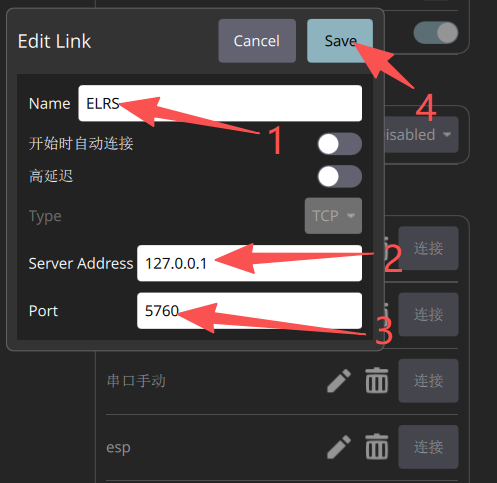
11.输入连接名字ELRS,打开高延迟选项,ip输入127.0.0.1,端口号选择5760,点击保存。
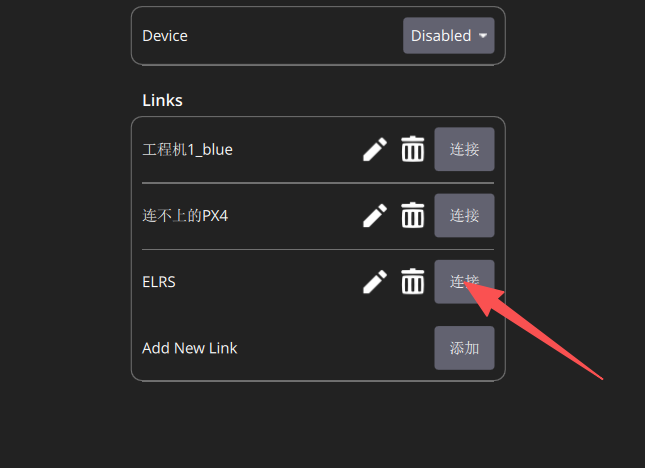
12.点击连接
13.返回到主页
14.连接完成