一、坐标确认
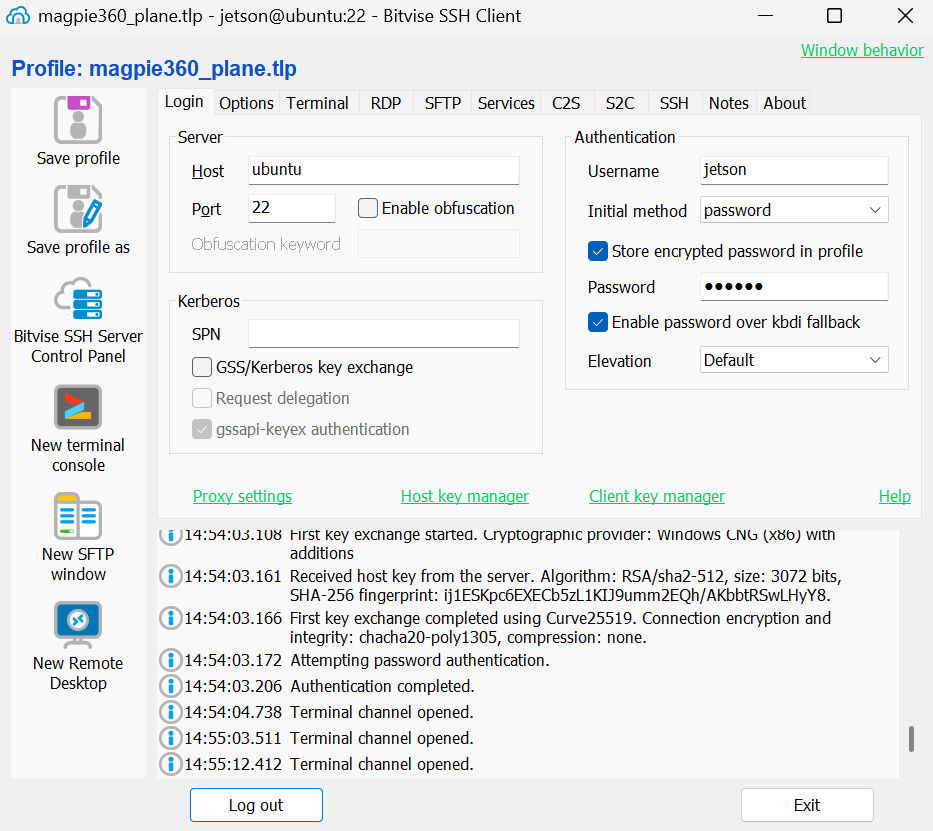
1.打开遥控器电源、接通无人机电源,确认无人机连接到手机热点后建立ssh连接。
2.将飞行器放置在场地起飞点,并且确保已经拆卸桨叶,确保飞行器方向和位置完全准确后开始下一步。

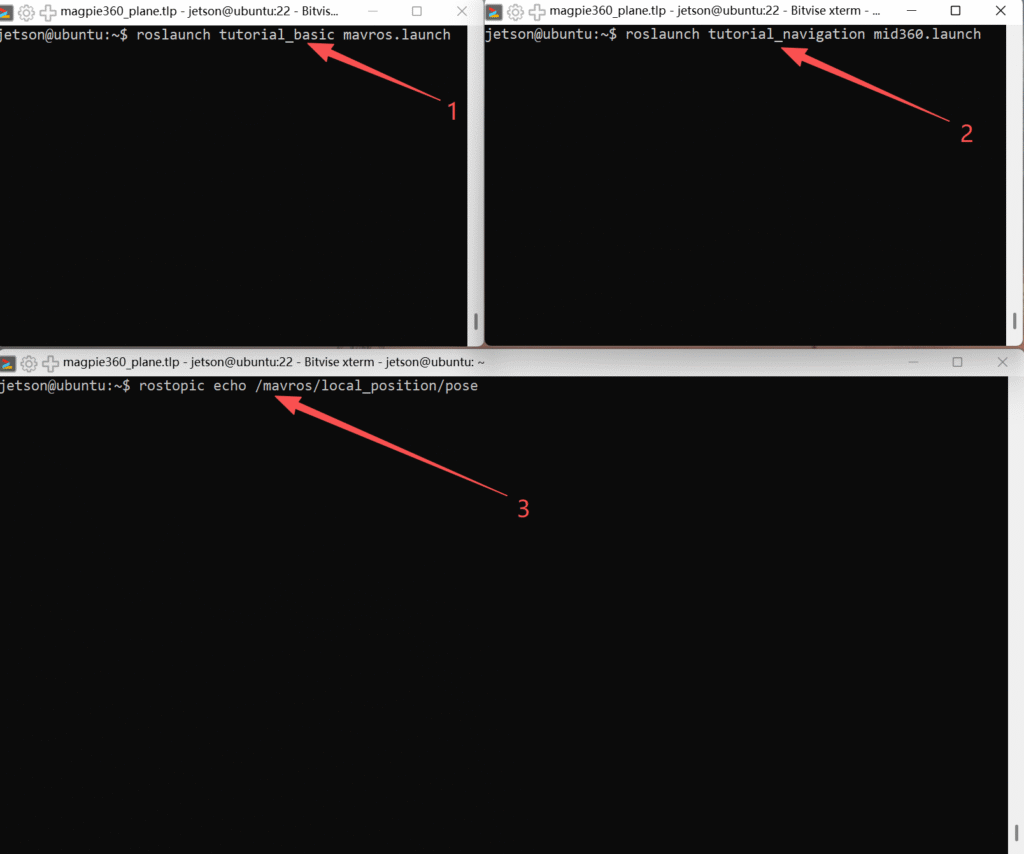
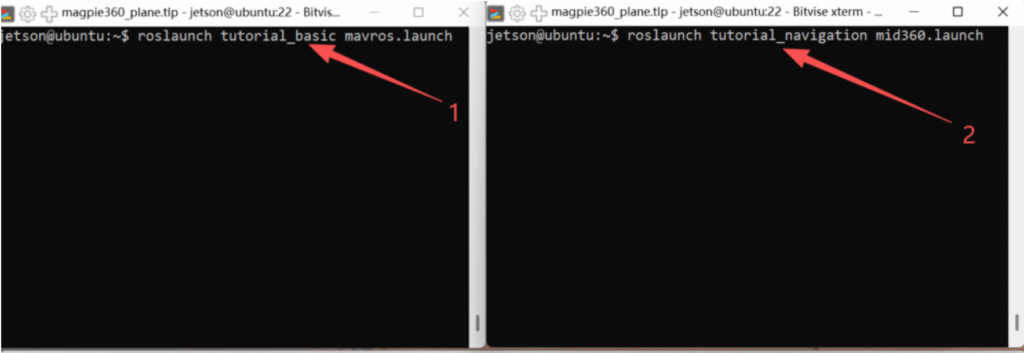
3.分别启动三个ssh连接后的终端,依次分别输入后回车:
roslaunch tutorial_basic mavros.launch
roslaunch tutorial_navigation mid360.launch
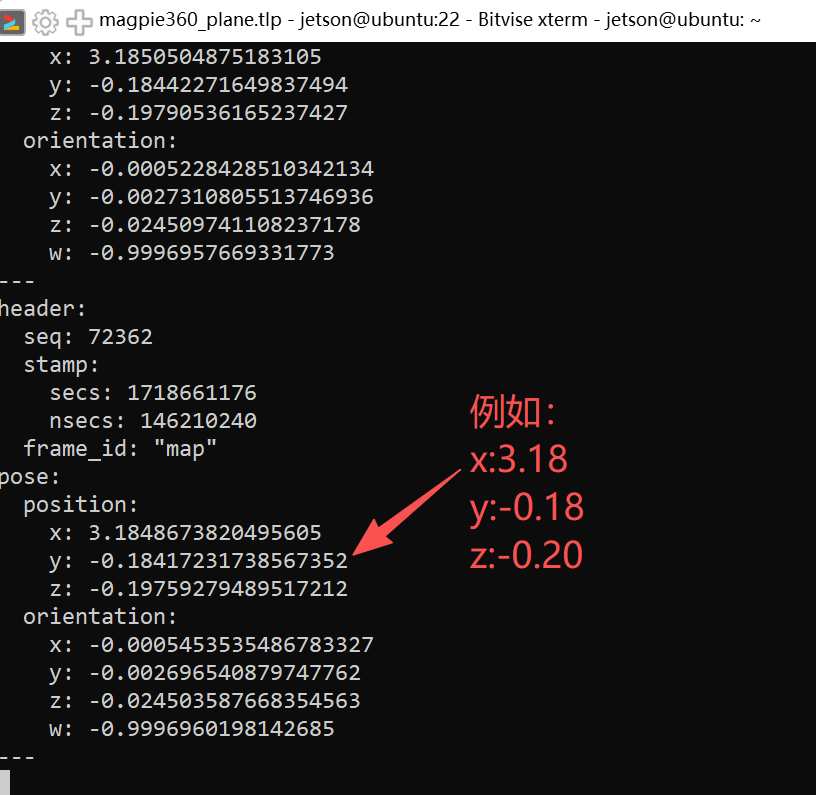
rostopic echo /mavros/local_position/pose
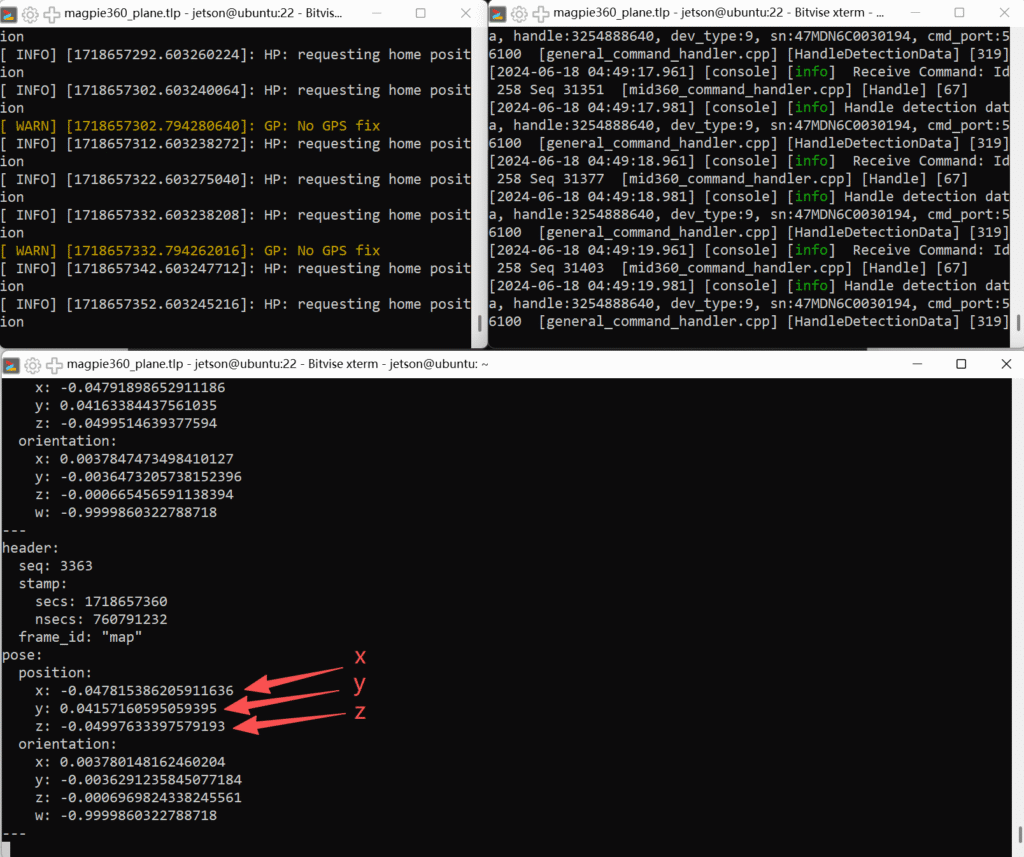
4.观察ssh终端三中输出的飞行器位置与姿态信息(确保数据一直在刷新,否则需要重新开始3步骤)。
5.将飞机拿到待测的航点。
警告:请勿将身体或者手遮挡激光雷达,这样会导致定位出现严重偏差和错误!!!
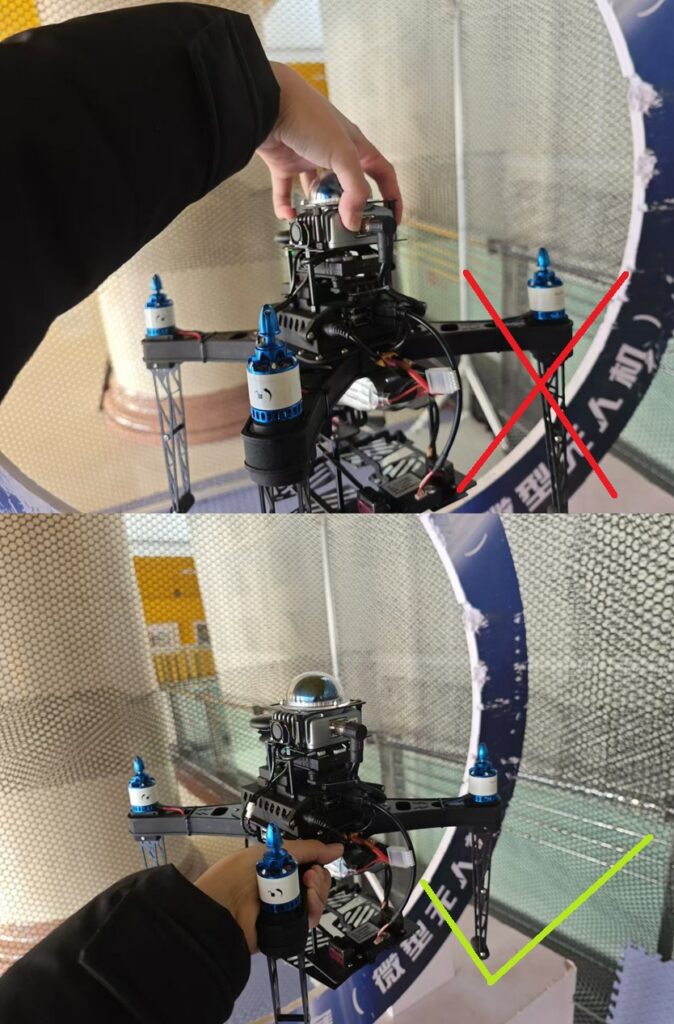
6.将飞行器放置到目标点位并且采集目标点位坐标信息,随后记录备用(保留小数点后两位)。
二、手动飞行
1.打开遥控器电源、接通无人机电源,确认无人机连接到手机热点后建立ssh连接。
2.将飞行器放置在场地起飞点,确保桨叶方向正确,并且确保遥控器开机,确保飞行器方向和位置完全准确后开始下一步。

3.分别启动两个ssh连接后的终端,依次分别输入后回车:
roslaunch tutorial_basic mavros.launch
roslaunch tutorial_navigation mid360.launch
4.检查电池电量是否充足,如电量充足则长按无人机解锁按钮,等待发出嘀嘀嘀的解锁提示声音

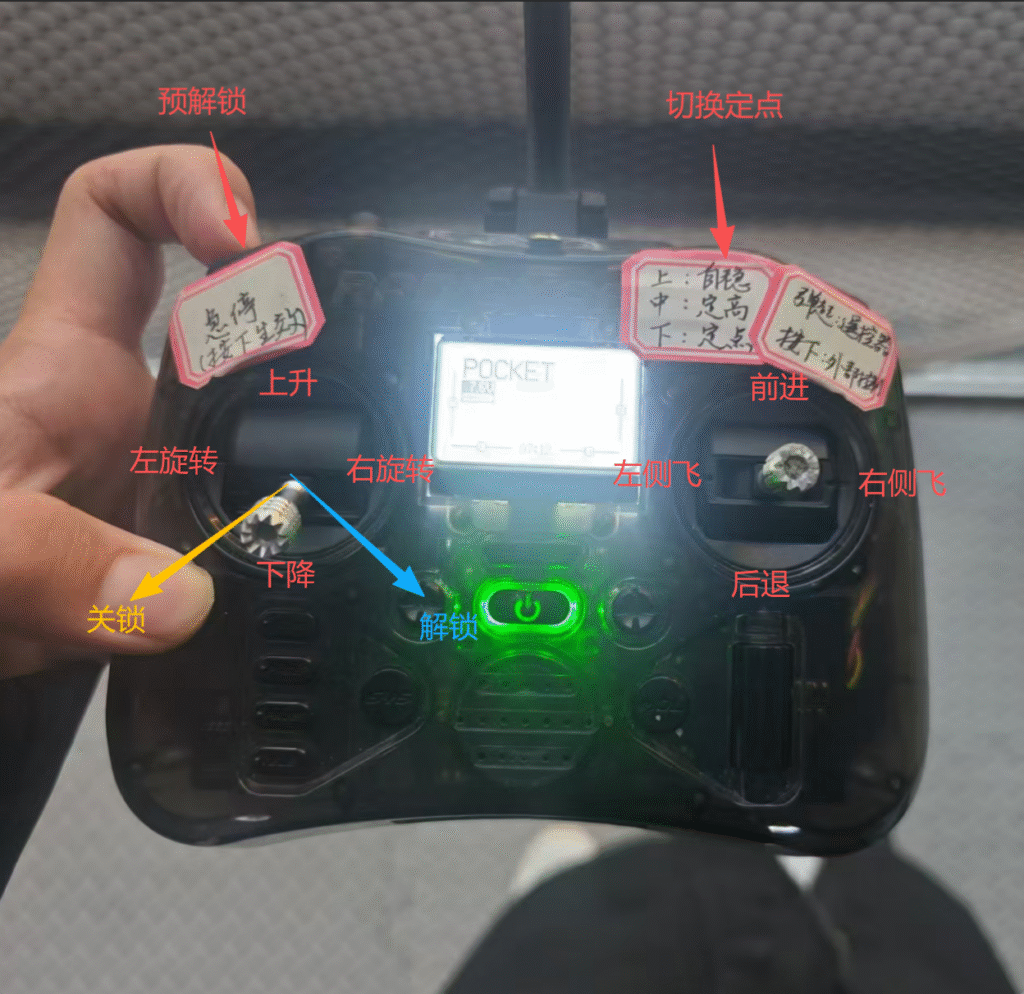
5.按下无人机模式切换按钮把无人机切换为定点飞行模式,按下开关预解锁无人机,向右下打油门杆解锁无人机,随后开始飞行。